M800S/M80/E80 Series Connection and Setup Manual
22 Setting the Position Detection System
467
IB-1501269-J
The zero point initialization is now complete. After initializing all axes, turn the power OFF and ON.
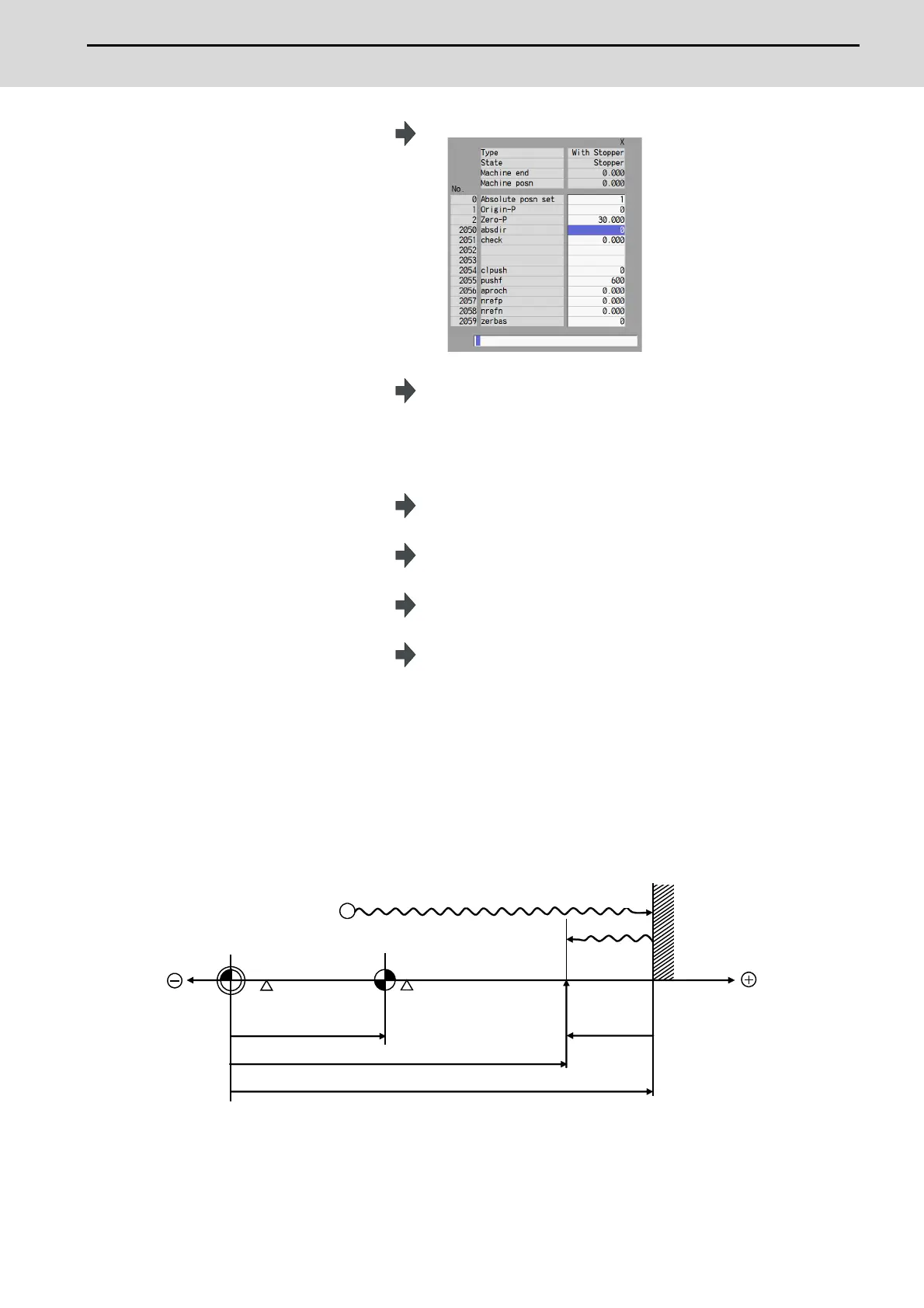
*1 If "#2059 zerbas = 0 (position where the axis was stopped in the stopper method (grid point immediately before
stopper = machine end stopper))" is set, the axis will stop automatically at the procedure (9) without moving in the
opposite direction. The condition will be as follows:
State: [Complete], Machine end: 0.000, Machine position: Current machine position.
*2 The operation order is slightly different when "#2059 zerbas = 1 (grid point just before stopper)" is set. Set the
procedure (6) "Zero-P" after "Complete" is displayed on "State" of the procedure (11).
- (7) to (11) in this diagram correspond to the operation procedure.
- Select either one of "#2 Zero-P" with the parameter.
(6) Move the cursor to "Zero-P" with
the [ ↑ ] and [ ↓ ] keys.
Enter the value in the input area and
press the [INPUT] key. (*2)
The input value is registered in the "Zero-P" area.
(7) Move the axis toward the machine end
stopper.
State: [Stopper]
Machine end: Distance between the machine end stopper and the grid
point immediately before the stopper
Machine position: Not passed -> Current machine position
Hereafter, the images for operations are omitted.
(8) Press the axis against the machine
end stopper.
State: [Stopper]
Machine position: Current machine position
(9) The current limit is reached continually
during the given time period.
State: [Release]
Machine position: Current machine position
(10) Move the axis in the counter direction. State: [Ret. Ref. P.]
Machine position: Current machine position
(11) The axis reaches the grid point
immediately before the stopper.
State: [Complete]
Machine position: Current machine position
(7)
(8)
(9)
(10)
(11)
”Basic machine
coordinate system zero
point”
Reference
position
Zero return parameter
"#2037 G53ofs"
Grid point
(electric basic
position)
Machine end stopper
(mechanical basic
position)
"Machine end"
"#2 Zero-P" (#2059 zerbas=1)
"#2 Zero-P" (#2059 zerbas=0)

 Loading...
Loading...






