M800S/M80/E80 Series Connection and Setup Manual
22 Setting the Position Detection System
472
IB-1501269-J
22.2 Adjustment of Reference Position Return in Relative Position
Detection System
22.2.1 Dog-type Reference Position Return Operation
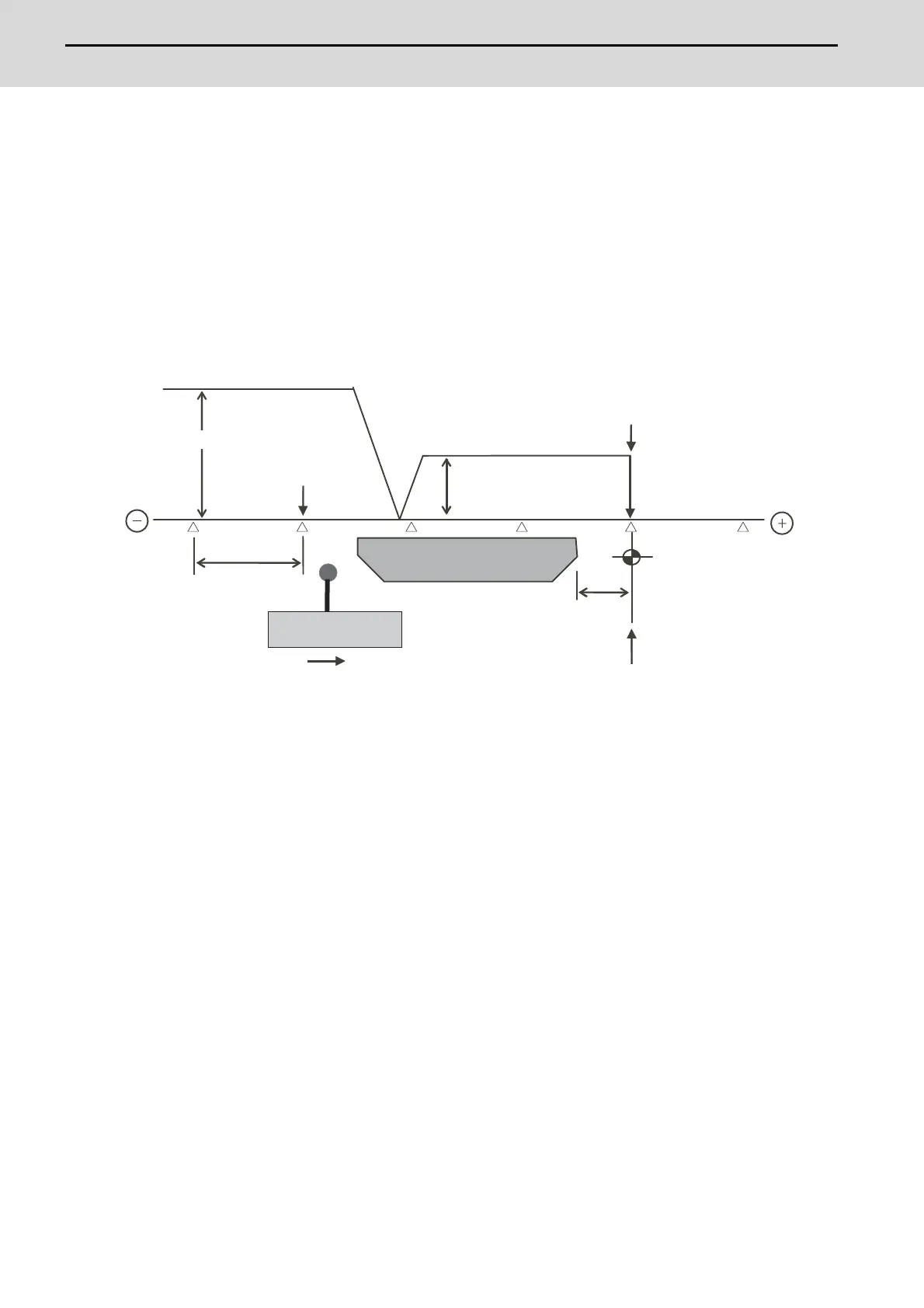
In the dog-type reference position return, the axis moves as follows:
(1) Starts moving at G28 rapid traverse rate.
(2) Decelerates to stop when the near-point dog is detected during the movement. Then, resumes moving at G28
approach speed.
(3) Stops at the first grid point after leaving the near-point dog.
This grid point, where the axis stopped at (3), is called the electrical zero point. Normally, this electrical zero point is
regarded as the reference position.
The first reference position return after turning the power ON is carried out with the dog-type reference position
return. The second and following returns are carried out with either the dog-type reference position return or the
high-speed reference position return, depending on the parameter.
High-speed reference position return is a function that directly positions to the reference position saved in the
memory without decelerating at the near-point dog.
(Note) If reference position return has never been executed after turning the power ON and a movement command
other than G28 is executed, the program error (P430) will occur.
G28 rapid traverse rate
Grid point
Grid space
Limit switch for
near-point detection
Near-point dog
Grid amount
Electrical zero point
Direction of
reference position return
G28 approach speed
Reference position

 Loading...
Loading...






