258 Rockwell Automation Publication 2198-UM002G-EN-P - February 2019
Chapter 6 Configure and Start the Kinetix 5700 Drive System
Configure Axis Properties
In this section you configure the axis properties of your Kinetix 5700 servo
drive for the type of feedback you intend use in your application.
Table 121
defines valid feedback assignments for each feedback type.
Table 121 - Valid Feedback Assignments
Digital AqB (TTL) Feedback
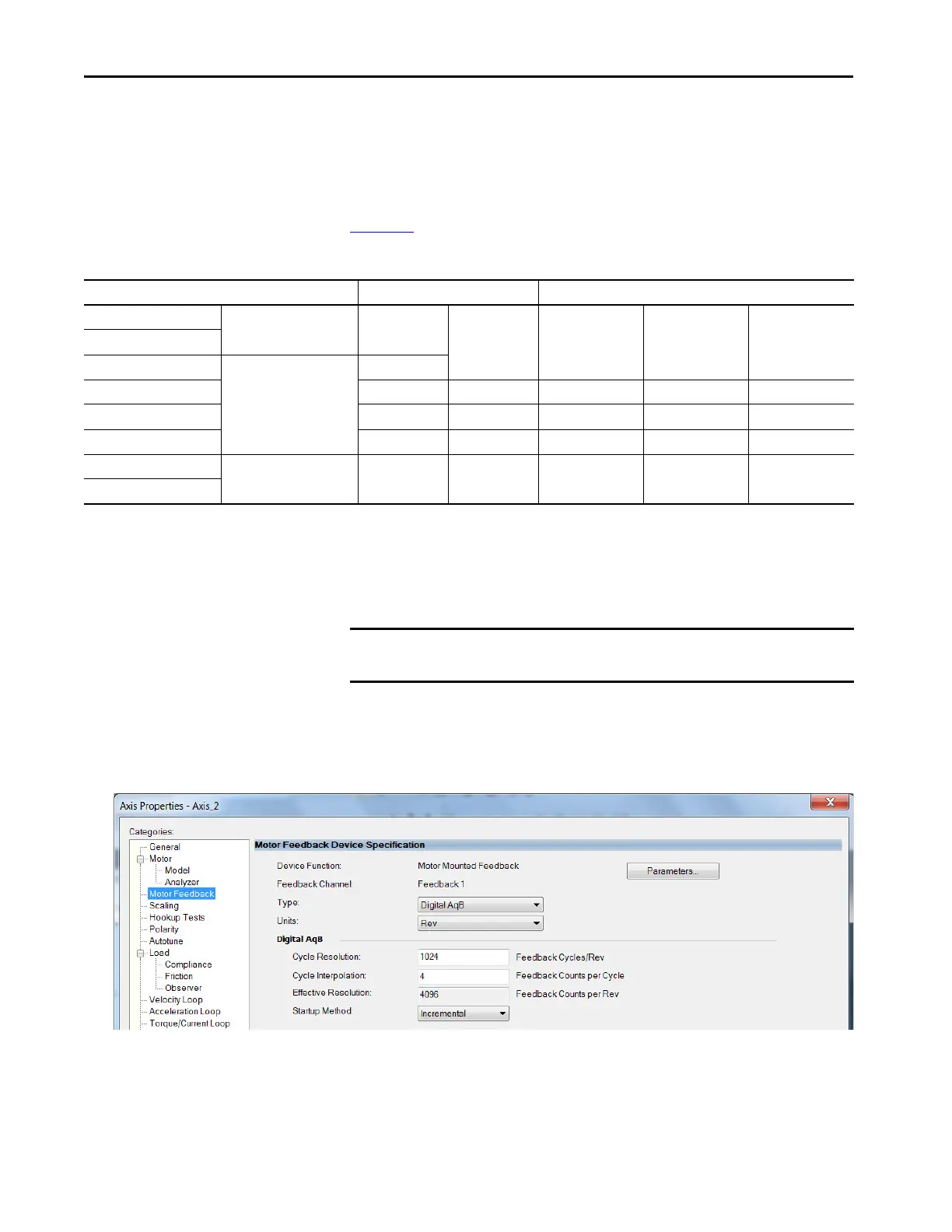
In this example, a motor feedback device is configured for Digital AqB
feedback.
1. In the Controller Organizer, right-click an axis and choose Properties.
2. Select the Motor Feedback category.
The Motor Feedback Device Specification dialog box appears.
3. Configure the device function and type.
In this example, Motor Feedback is the device function and Digital AqB
is the feedback type.
Feedback Type Permanent Magnet Motors Induction Motors
Hiperface DSL
High-resolution single-turn
and multi-turn, absolute
Motor feedback
Load feedback Motor feedback Load feedback Master feedbackHiperface
Digital AqB
Incremental
N/A
Digital AqB with UVW Motor feedback N/A N/A N/A N/A
Sine/Cosine N/A Load feedback Motor feedback Load feedback Master feedback
Sine/Cosine with UVW Motor feedback N/A N/A N/A N/A
EnDat Sine/Cosine
High-resolution single-turn
and multi-turn, absolute
Motor feedback Load feedback Motor feedback Load feedback Master feedback
EnDat Digital
IMPORTANT When Motor Mounted Feedback is the Device Function, Digital AqB (without
UVW) is not a valid feedback type for permanent magnet motors.
 Loading...
Loading...






