34 Rockwell Automation Publication 2198-UM002G-EN-P - February 2019
Chapter 1 Start
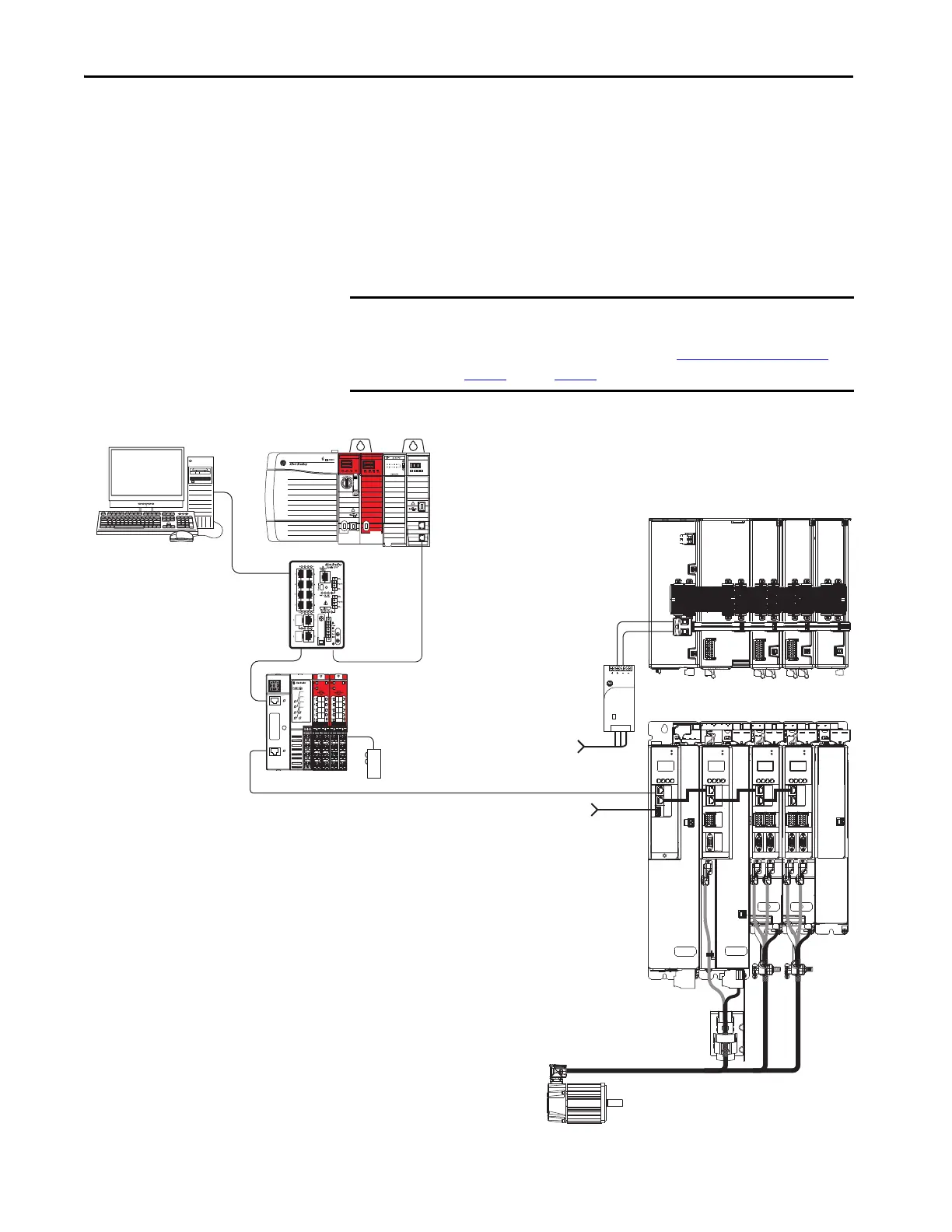
Integrated Safety Configurations
The GuardLogix or Compact GuardLogix safety controller issues the safe
torque-off (STO) or safe stop (SS1) command over the EtherNet/IP network
and the Kinetix 5700 servo drive executes the command.
In this example, a single GuardLogix safety controller makes the Motion and
Safety connections.
Figure 16 - Motion and Safety Configuration (single controller)
IMPORTANT If only one controller is used in an application with Motion and Safety
connections, it must be a GuardLogix or Compact GuardLogix safety
controller. For more information, see the Integrated Functional Safety
Support table on page 16.
1606-XL
Power Supply
Input
Allen-Bradley
LNK1LNK2 NET OK
EtherNet/IP
1
2
MOD
NET
MOD
NET
MOD
NET
MOD
NET
2
1
1
4
I/O
2
1
2
1
2
1
UFB
UFB-A UFB-B
UFB-A UFB-B
D+
D-
D+
D-
D+
D-
MF-A MF-B MF-A MF-B
D+
D-
MBRK
+
-
DC+
SH
SB+/NC
NC
19
8
16
19
8
16
19
8
16
S1A
SCA
S2A
SB-
NC
NC
SB+/NC
NC
S1A
SCA
S2A
SB-
NC
NC
SB+/NC
NC
S1A
SCA
S2A
SB-
NC
NC
1
I/O
6
5
10
1
I/O-A
6
510
1
I/O-B
6
510
1
I/O-A
6
510
1
I/O-B
6
510
1585J-M8CBJM-x
Ethernet (shielded) Cable
Compact GuardLogix 5370 Controller,
Compact GuardLogix 5380 Safety Controller or
GuardLogix 5570 Controller,
GuardLogix 5580 Safety Controller
(GuardLogix 5570 Safety Controller is shown)
Studio 5000 Logix Designer
Application
AC Input Power
Kinetix 5700 Servo Drive System
(top view)
Kinetix 5700 Servo Drive System
(front view)
Digital Inputs to Sensors and Control String
1606-XLxxx
24V DC Control, Digital Inputs,
and Motor Brake Power
(customer-supplied)
Kinetix VP
Servo Motors
1783-BMS
Stratix 5700
Switch
Module Definition
Configured with
Motion and Safety
Connection
1734-AENTR
POINT Guard I/O™
EtherNet/IP Adapter
Safety
Device
 Loading...
Loading...






