Calibration
FQ2-S4 User’s Manual
237
7
Convenient Functions
7-2 Calibration
Calibration
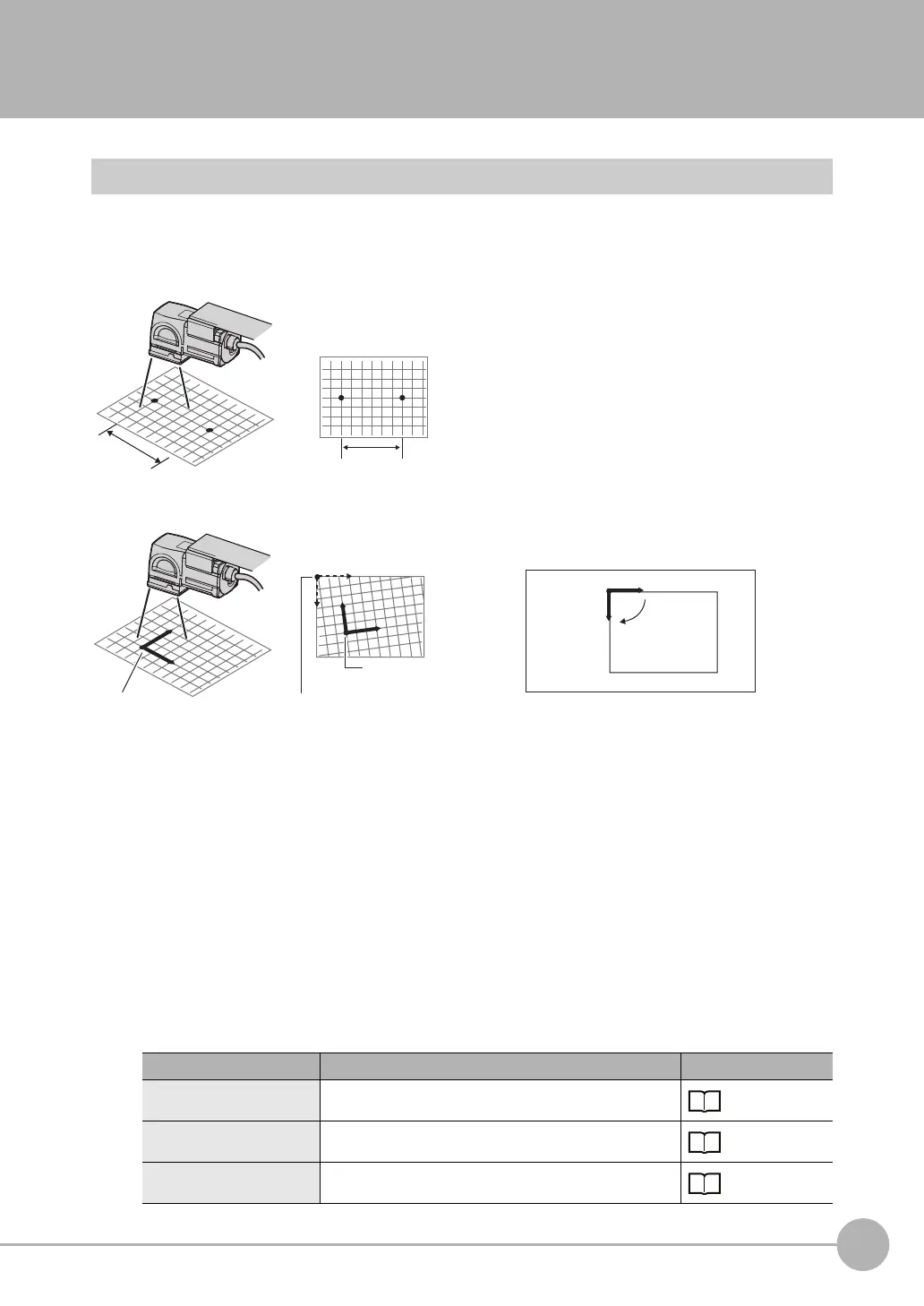
Calibration is used to convert Camera coordinates into actual coordinates.
You can set calibration to output the detected position in the actual coordinates.
You can convert pixels to actual dimensions and then output them.
You can also compensate for offsets in the origin and coordinate system.
• Calibration Conversion Methods
There are the following three conversion methods for calibration.
Point specification: You can enter the actual pixel coordinates of any position.
Reference: You can measure a registered model and then enter the actual coordinates of the model.
Parameter: You can enter the calibration values directly.
• Setting Calibration
Use the following procedure to set calibration.
1 Set the conversion method to use for calibration.
Select the calibration method (point specification, reference, or parameter) and enter the actual coordi-
nates or other values that are suitable for the selected method.
You can register up to 32 calibration patterns.
Calibration type Description Reference
Specify point (point specifica-
tion)
Specify from two to ten points and enter their actual coordinates.
p. 238
Reference sampling (refer-
ence)
Search for a registered model and enter the actual coordinates
of the position where the model is detected.
p. 240
Parameter Enter the numeric values of the parameters directly to calculate
the calibration data.
p. 242
30 mm
540 pixels = 30 mm
Example
Origin of actual coordinates
Origin of Camera coordinates
Example
Camera coordinates
0
X
Y
Origin of
Camera
coordinates
Positive
direction
for angles
Origin of actual
coordinates

 Loading...
Loading...








