Commissioning Manual
01/2017
177
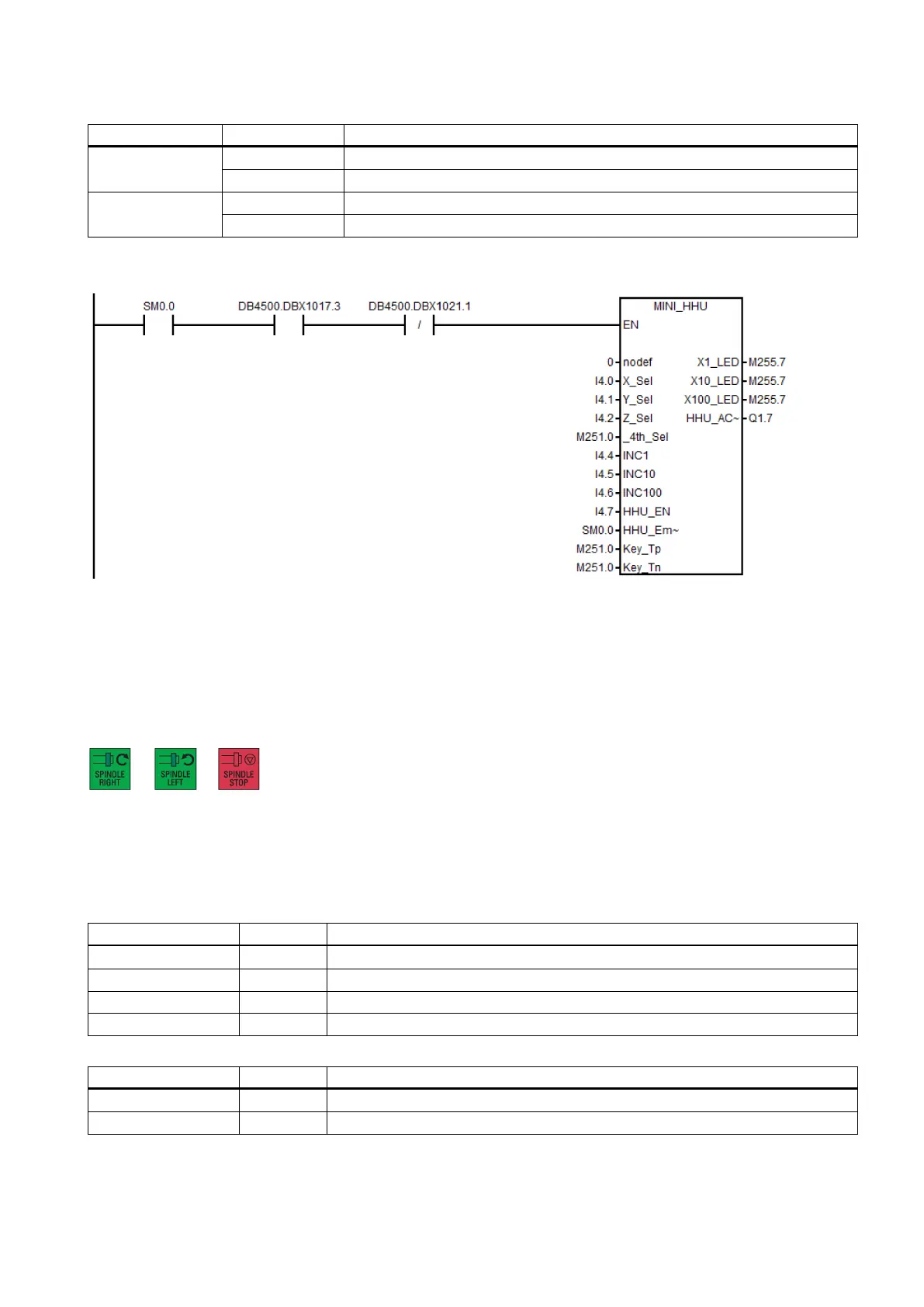
Relevant PLC machine data
14512 [17].3
Choose to use a hand-held unit
Choose to use a handwheel
14512 [21].1
Set I0.0 to I2.7/Q0.0 to Q1.7 as the standard I/O wiring in the default PLC
Set I6.0 to I8.7/Q4.0 to Q5.7 as the standard I/O wiring in the default PLC
Example for calling subroutine 41
Subroutine 42 - SPINDLE (spindle control)
Purpose
Subroutine 42 is used for spindle control, including the spindle braking function. When the braking function is activated
(MD14512 [19].1 = 1), the spindle brakes in the following cases:
● In "JOG" mode, after you perform the following operations:
or →
● In "AUTO" or "MDA" mode, when the spindle changes the rotating direction or is stopped with M05/M02 during rotation
When the spindle brakes, the corresponding output becomes active; meanwhile, the spindle does not accept any rotary
command until the braking completes.
Local variable definition
Inputs
Spindle brake delay time (unit: 0.1 s)
Condition for spindle operation (1: allowed; 0: not allowed)
Brake for spindle (1: enabled; 0: forbidden)
SP_brake BOOL Spindle brake contactor
Spindle operating status LED

 Loading...
Loading...