Rockwell Automation Publication 2094-UM002G-EN-P - August 2016 79
Connector Data and Feature Descriptions Chapter 4
Feedback Specifications
The control module accepts motor and auxiliary feedback signals from the
following types of encoders with these general specifications.
Table 37 - Motor and Auxiliary Feedback General Specifications
Absolute Position Feature
The drive’s absolute position feature tracks the position of the motor, within
the multi-turn retention limits, while the drive is powered off. The absolute
position feature is available with only these multi-turn encoders.
Table 38 - Absolute Position Designator Examples
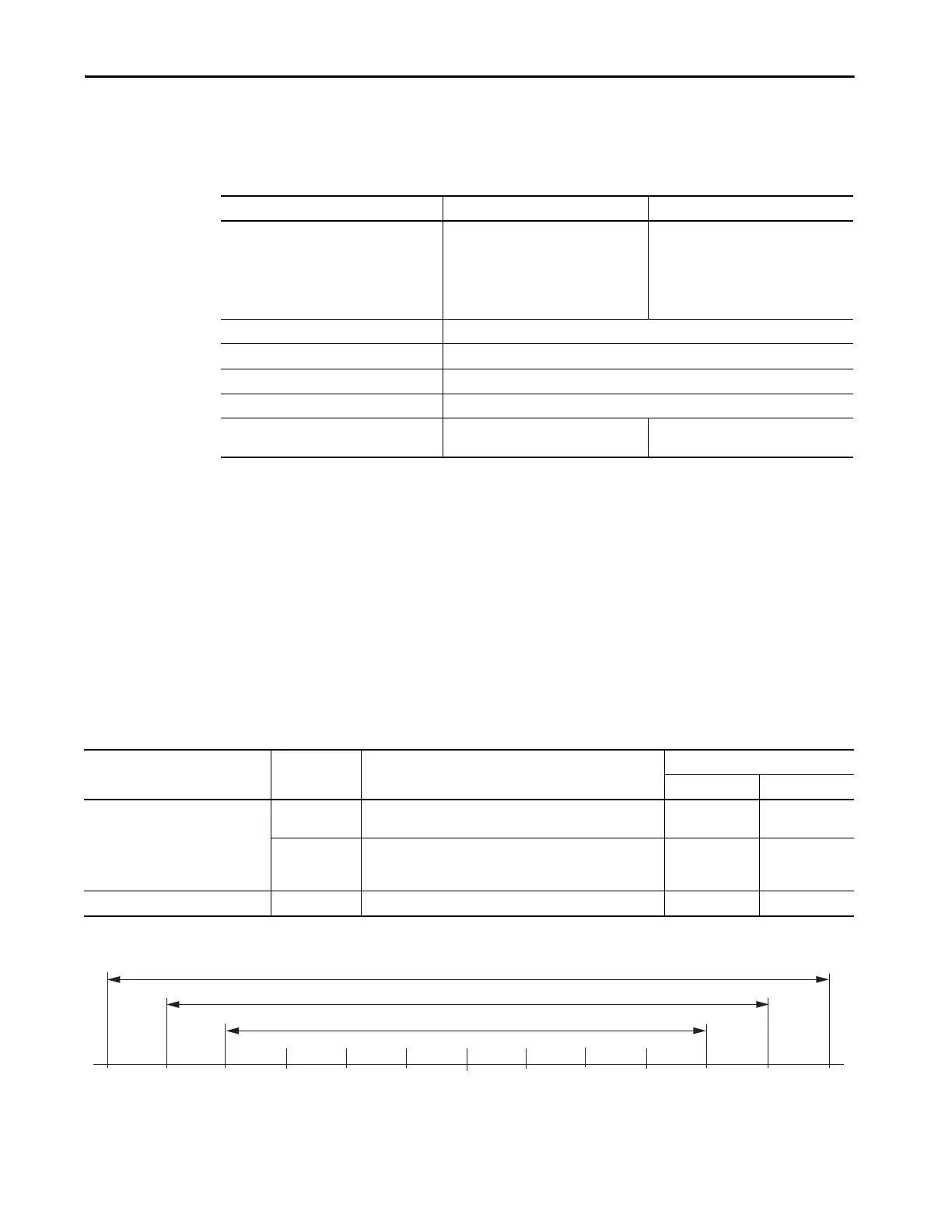
Figure 39 - Absolute Position Limits (measured in turns)
Attribute Motor Feedback Auxiliary Position Feedback
Feedback device support
• Stegmann Hiperface
• Generic TTL Incremental
• Generic Sine/Cosine Incremental
• Tamagawa 17-bit Serial
• Heidenhain EnDat Sin/Cos
• Heidenhain EnDat Digital
• Stegmann Hiperface
• Generic TTL Incremental
• Generic Sine/Cosine Incremental
• Heidenhain EnDat Sin/Cos
• Heidenhain EnDat Digital
Power supply voltage (MTR_EPWR5V)
(1)
5.1…5.4V
Power supply current (MTR_EPWR5V)
(1)
300 mA, max
Power supply voltage (MTR_EPWR9V)
(1)
8.3…9.9V
Power supply current (MTR_EPWR9V)
(1)
150 mA, max
Thermostat
Single-ended, under 500 Ω = no fault,
over 10 kΩ = fault
N/A
(1) The EPWR_5V and EPWR_9V power supplies are shared between the motor feedback interface and the auxiliary feedback interface on the I/O (IOD) connector.
TIP Auto-configuration in the Logix Designer application of intelligent absolute, high-
resolution, incremental, and EnDat encoders is possible only with Allen-Bradley
motors.
Encoder Type
Cat. No.
Designator
Motor/Actuator Cat. No.
Retention Limits (turns)
Kinetix 6200 Kinetix 6500
Stegmann Hiperface
-M
MPL-Bxxxxx-M, MPM-Bxxxxx-M, MPF-Bxxxxx-M, MPS-Bxxxxx-M,
MPAR-B3xxxx-M, MPAI-BxxxxxM
4096 (±2048) 2048 (±1024)
-V
MPL-Bxxxxx-V,
MPAS-Bxxxx1-V05, MPAS-Bxxxx2-V20,
MPAR-B1xxxx-V, MPAR-B2xxxx-V, MPAI-BxxxxxV
4096 (±2048) 4096 (±2048)
Heidenhain EnDat -7 RDB-Bxxxxxx-7 4096 (±2048) 1024 (±512)
+2048-2048 +1024-1024
+64
-64
+256-256
+512
-512
0
-128
+128
Position at Power Down
4096 Turns
2048 Turns
1024 Turns

 Loading...
Loading...





