1 Safety
1.2.5.1. Overview of robot stopping functions
213HAC021313-001 Revision: K
© Copyright 2004-2008 ABB. All rights reserved.
RAPID instructions are described in Technical reference manual - RAPID Instructions,
Functions and Data types.
System failure stops
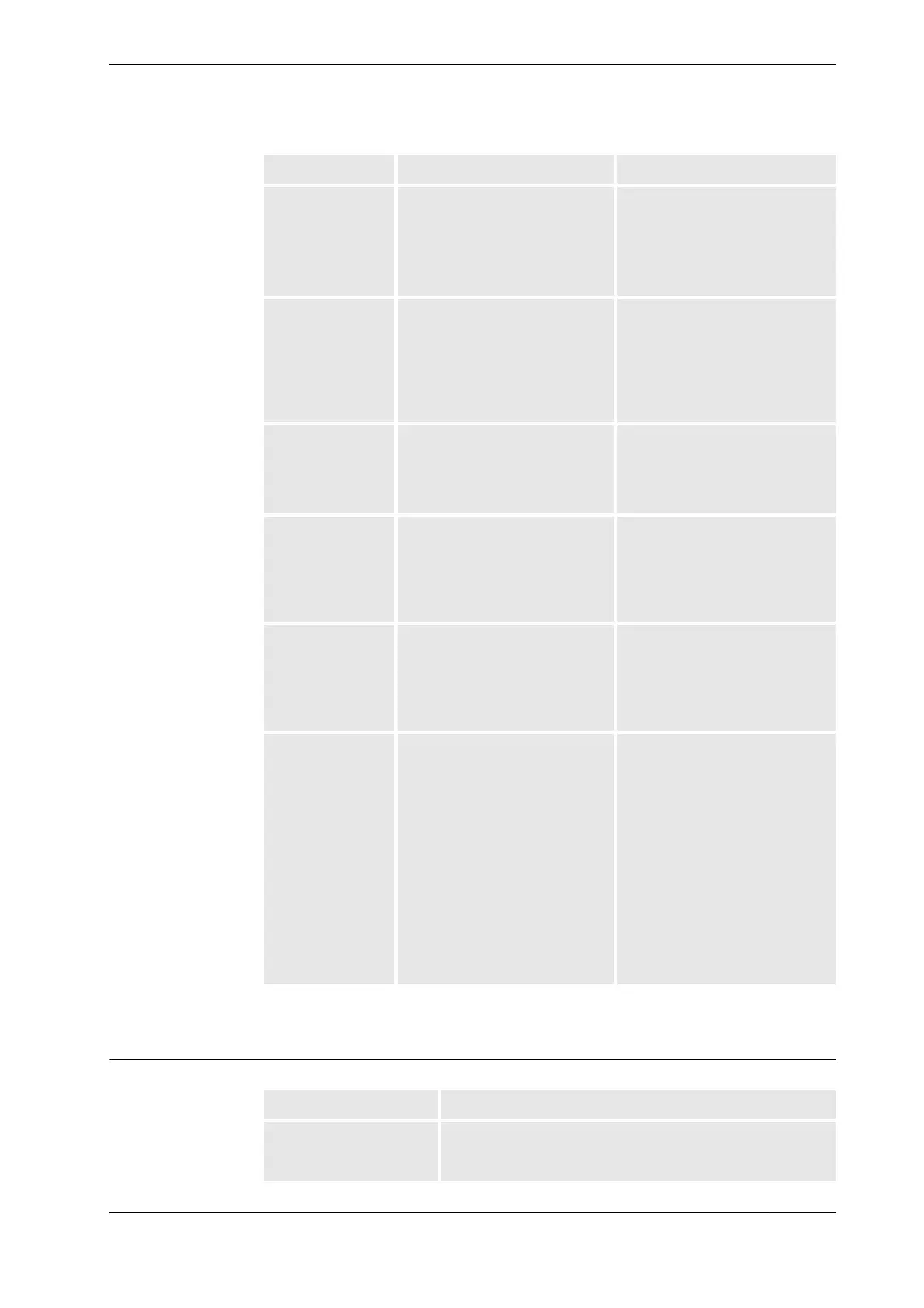
Stop The current move instruction will
be finished before the robot stops.
A restart will continue the program
execution.
\NoRegain - the robot will not
return to the stop point when
restarted, e.g. after having been
jogged away.
\AllMoveTasks - all robots will be
stopped
StopMove The current move instruction will
be stopped immediately as a
normal program stop but the
program execution will continue
with the next instruction. This is
often used in for example trap
routines.
\Quick - the stop will be a soft stop
on path, as described above for
system input SoftStop, otherwise
similar to a normal program stop.
\AllMotionTasks - all robots will be
stopped
BREAK The current move instruction and
the program execution will be
stopped immediately as a normal
program stop. A restart will
continue the program execution.
EXIT The current move instruction and
the program execution will be
stopped immediately as a normal
program stop. After stop the
Program Pointer has to be reset to
Main.
EXITCYCLE The current move instruction and
program execution will be stopped
immediately. The Program Pointer
will be reset to Main and if running
mode is continuous, the program
will be restarted.
SearchX Search instructions can be
programmed with arguments to
stop the robot movement close to
the point where a search hit was
noticed. The program execution
will continue with the next instruc-
tion.
\Stop - the robot will stop as fast as
possible. This stop is performed
by ramping down motion in each
motor separate from each other,
and as fast as possible. Since it
will be without any coordination,
the robot may slide off path fairly
much. This is also called StiffStop.
\PStop - the robot will stop like
after a normal program stop.
\SStop - the robot will stop on path
but quicker than a normal program
stop. This is similar to a system
input SoftStop.
Instruction: Description: Arguments:
Type of stop: Description:
SysFail At system failure raising a SysFail error the robot will stop imme-
diately, with brakes being activated.
This is an uncontrolled stop category 0.
Continued
Continues on next page