Navigation Sensors •
••
• 301
Source of position
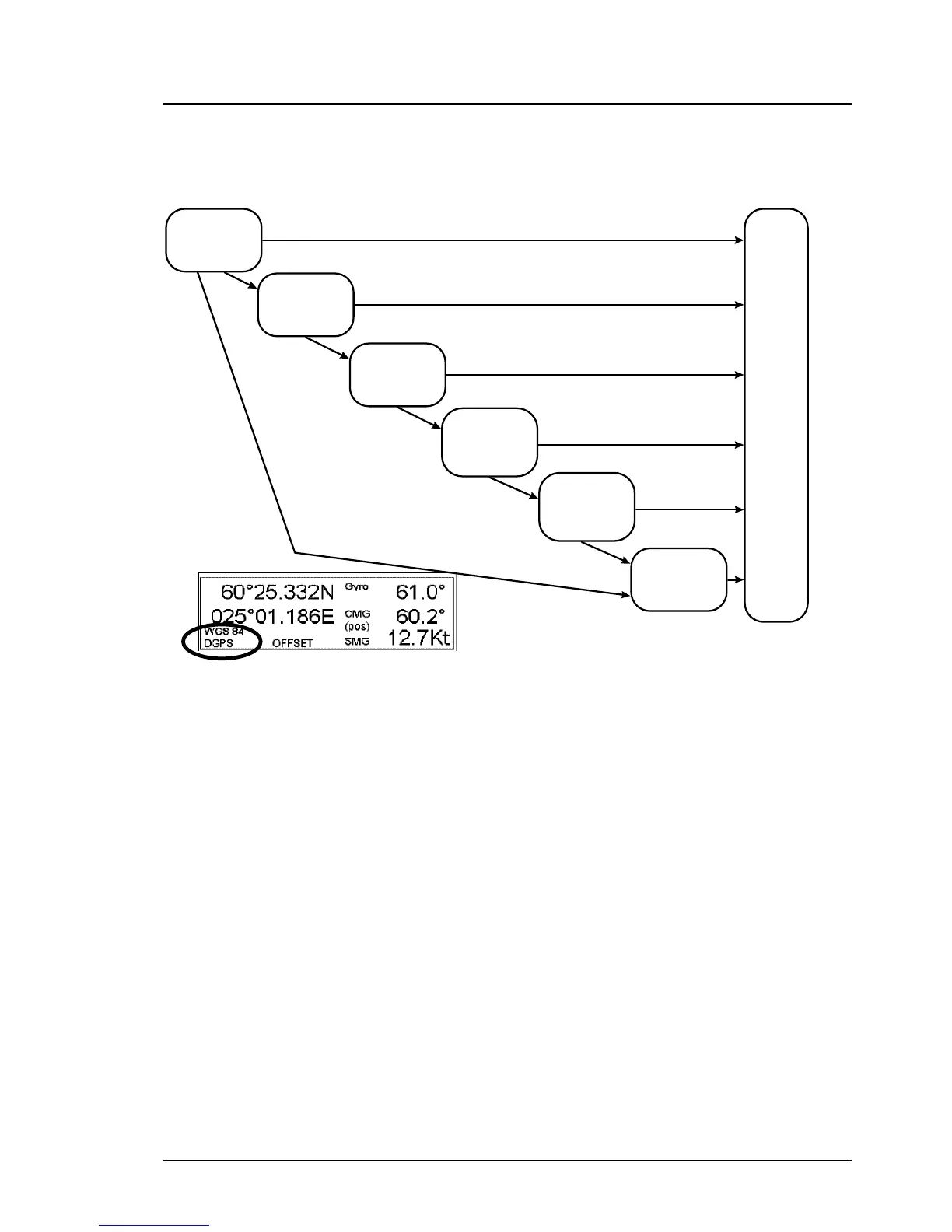
Use Figure below to find source of position. Kalman filter uses all position sensors, which have either primary or
secondary, as input for its calculation. GPS in differential operation mode and SYLEDIS position sensors (high
precision position sensors) are considered better than other position sensors.
KALMAN filter
GPS in diff. mode
or SYLEDIS
selected as
PRIMARY
GPS in diff. mode
or SYLEDIS
selected as
SECONDARY
Any other than
GPS in diff. mode
or SYLEDIS
selected as
PRIMARY
Any other than
GPS in diff. mode
or SYLEDIS
selected as
SECONDARY
Position
used by
the system
Selected and position exist
Selected and position exist
Selected and position exist
Selected and position exist
Not
selected
Backup
Dead Reckoning
Selected and
position exist
Not selected
or no position
Not selected
or no position
Not selected
or no position
Not selected
or no position
Selected and
No position
Position used by the System is shown in right hand upper corner of ECDIS display (the example above shows
DGPS). Following alternatives are available:
• NO POSIT, in red colour, if even no dead reckoning sensors are selected and valid.
• DEAD REC, in red colour, if position source is dead reckoning
• DGPS, GPS, LORAN, DECCA or SYLEDIS if position source is a receiver operating in
indicated mode
• LOST DGPS, in red colour, if the user selection includes a DGPS device, which doesn't
operate in differential mode.
• FIL LOST DGPS, in red colour, if the Kalman filter is in use and it includes a DGPS device,
which doesn't operate in differential mode.
• REFTARG, if position source is tracked ARPA targets controlled by the system
• FILTER HIGH, if position source is the Kalman filter with high precision position sensor.
• FILTER, if position source is the Kalman filter without high precision position sensors
• BAD FILTER, in red colour, if position source is the Kalman filter and the filter has excluded
at least one of the selected sensors because of bad behaviour
If the system changes the source of position based on lost sensor data or change of differential mode of a DGPS
sensor, then the system generates alarm "2009 Position source change". If the Kalman filter is used then the system
generates alarm "2010 Filter: Pos source change"
If a selected DGPS sensor changes its operation mode and if the user has used selection Primary or Secondary,
then the system generates alarm "4027 DGPS pos. source change" (4027 for first sensor, 4028 for second etc.).
 Loading...
Loading...