19 – 300 HEIDENHAIN Service Manual iTNC 530 HSCI
19.2 Speed encoders
19.2.1 Introduction
Speed encoders in motors are also referred to as motor encoders.
They report the speeds of the axes and spindles to the control.
The iTNC 530 operates with incremental and absolute encoders.
Permissible encoders :
Encoders with one reference mark
Encoders with distance-coded reference marks
Encoders with EnDat interface 2.1, 2.2
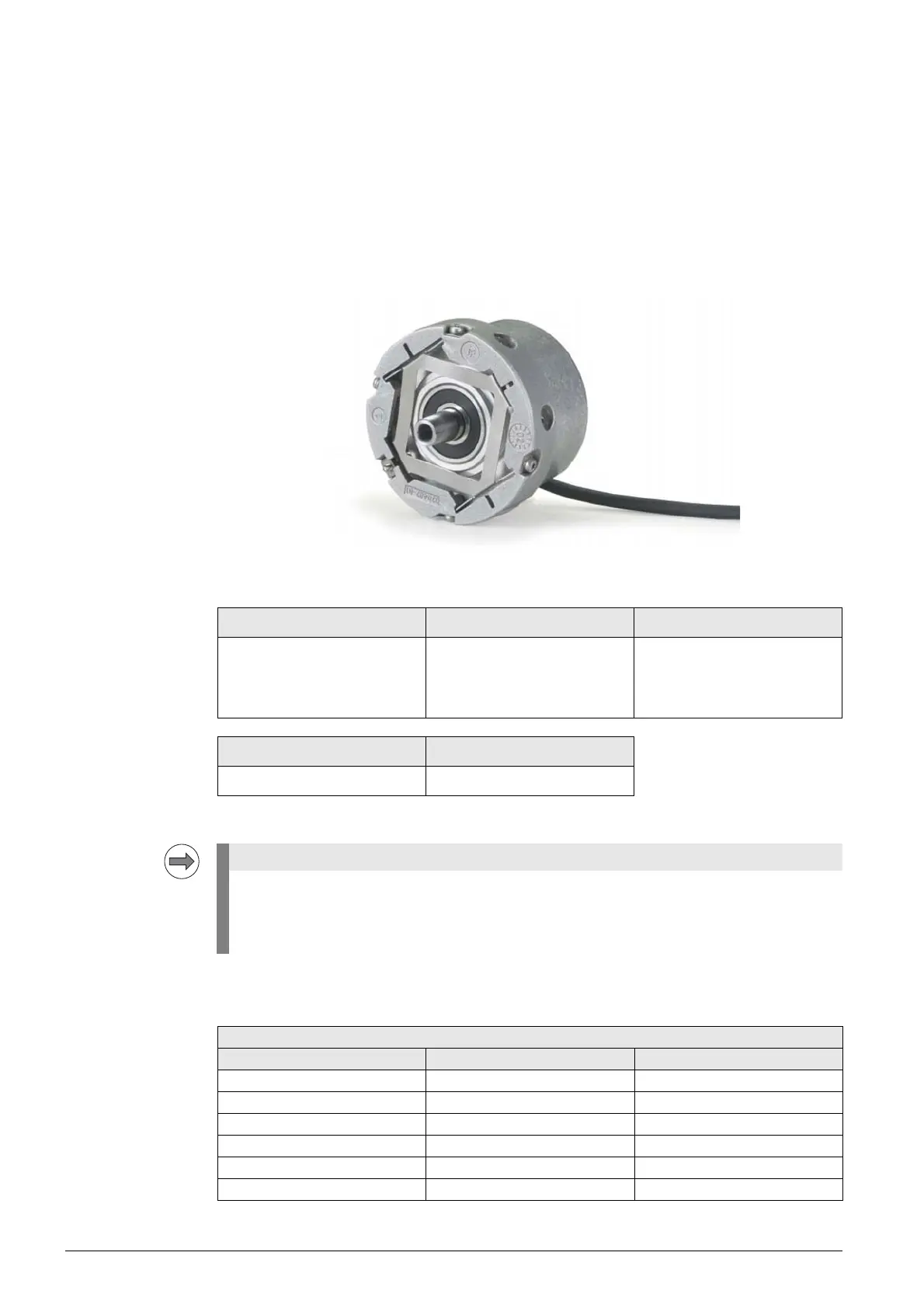
Speed encoder
inputs
Polyfuses
Fixed assignment
on CC61xx and
UEC 11x
On the CC 61xx there is a fixed assignment between the PWM output, the input of the speed
encoder and the input of the position encoder:
CC 6106 CC 6108 CC 6110
X15 to X20 X15A to X18A
(controller basic board A)
X15B to X18B
(controller basic board B)
X15A to X18A
(controller basic board A)
X15B to X20B
(controller basic board B)
UEC 111 UEC 112
X15 to X18 X15 to X19
CC 61xx and UEC 11x feature "polyfuses".
Polyfuses are electronic fuses that become highly resistive if an overload occurs and thus separate
defective peripherals (e.g., motor encoder) from the low voltages of the CC 61xx or the UEC 11x.
Polyfuses are equipped with a self-resetting function ("self-healing effect").
CC 6106
PWM output Speed input Position input
X51 X15 X201
X52 X16 X202
X53 X17 X203
X54 X18 X204
X55 X19 X205
X56 X20 X206
 Loading...
Loading...




