February 2012 21 – 349
21.2 Analog speed value interface
21.2.1 Introduction
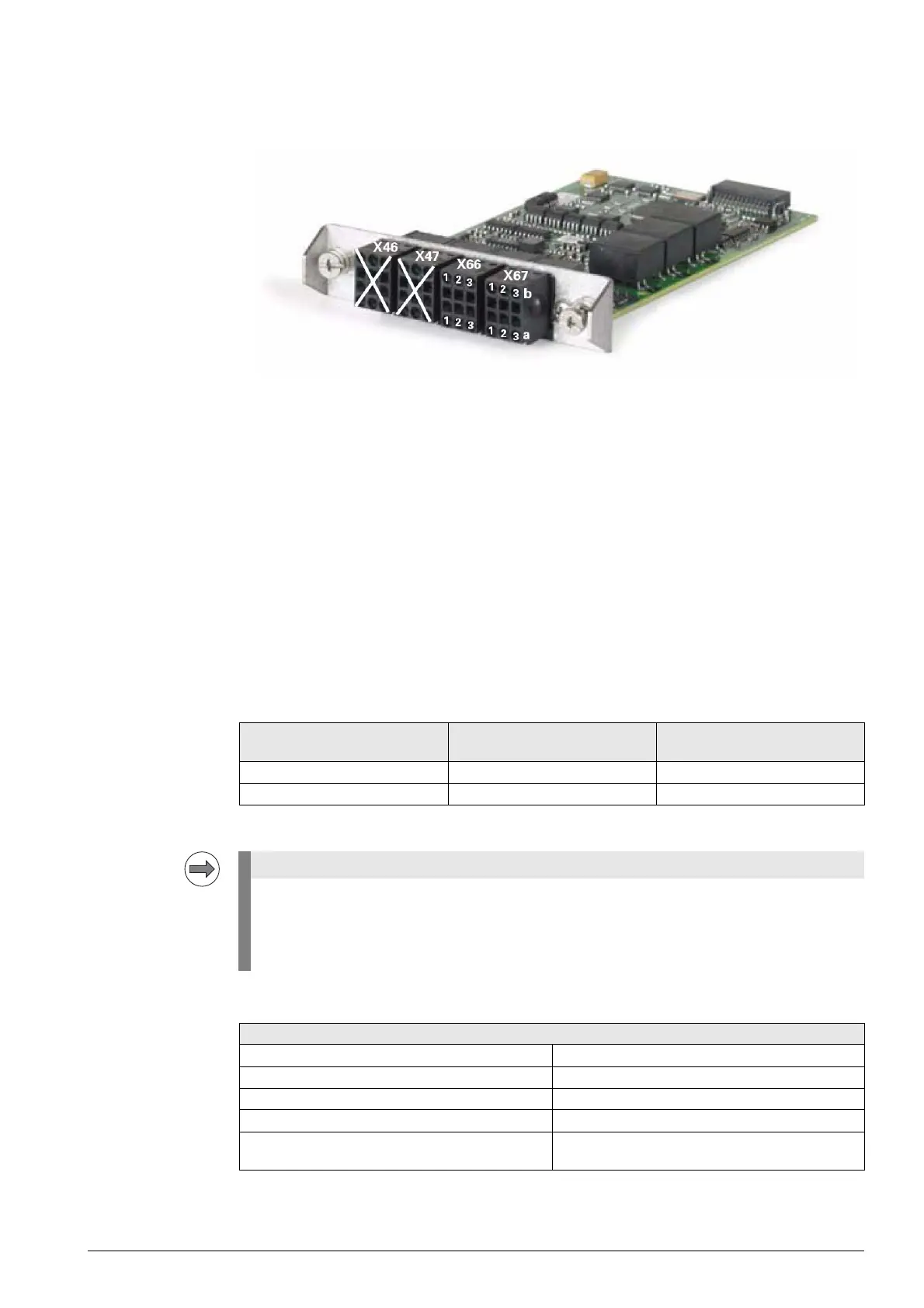
Picture: CMA-H 04-04-00, additional module for analog axes and spindles
The module is inserted into a slot of the CC 61xx or UEC 1xx controller units.
For the operation of analog axes and spindles, the position controller is in the HEIDENHAIN control,
the speed controller and the current controller are in the analog servo amplifier.
The "result" of position control - i.e. the controller output - is transferred to the analog servo amplifier
via the ±10 V nominal speed value interface.
Analog servo amplifiers are also referred to as analog servos.
DC motors are often used for analog drives.
Additional module
for analog axes/
spindles
In the HSCI system, analog nominal-value outputs (e.g. for controlling spindles and auxiliary axes)
are available via the CMA-H 04-04-00.
The CMA-H 04-04-00 is an optional SPI expansion module. It adds four analog ±10 V nominal value
outputs to the CC 61xx and UEC 1xx controller units.
Specifications of
the analog channels
Controller units Number of CMA-H 04-04-00
modules per unit
Max. number of
nominal value outputs
CC 61xx 2 8
UEC 11x 1 4
The analog nominal-value outputs can only be accessed via the NC, and not via the PLC.
The PL 6xxx provides PLC analog outputs.
It is not possible to control interpolating axes; only spindles and auxiliary axes that are not
interpolated together with other digital axes can be controlled.
CMA-H 04-04-00
Output voltage +/- 10 V
Load capacity R
L
≥ 1 kΩ, I ≤ 10 mA
Short-circuit stability Permanent short circuit 20 mA
Resolution 16 bits = 65536 increments
Smallest step
10V
65536
--------------- 0.1525 mV=
 Loading...
Loading...




