D2 Drive User Guide v1.8 5. Drive Configuration
HIWIN Mikrosystem Corp. 99
5.3.3. Setting procedure
This section describes the procedure of auto phase initialization for LSWIR. As for STABS, it can
use the same procedure for LSWIR.
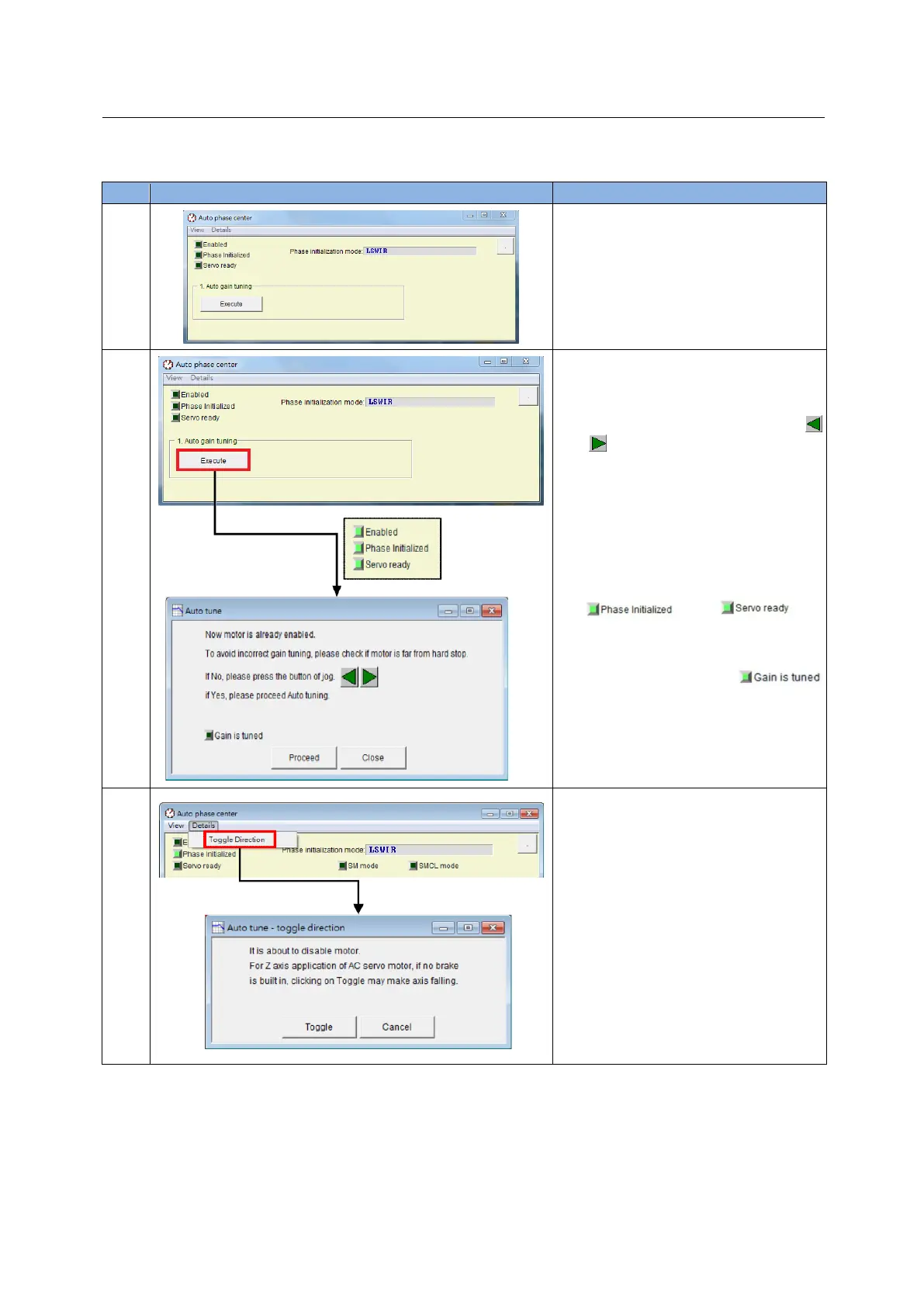
Graphical (HMI) description
Setting phase initialization method:
For the motor with the 9-th bit of motor
model name being 5, the phase
initialization method is automatically set to
LSWIR.
Phase initialization and auto tune:
Click the “Execute” button, as shown in the
left figure, to start the phase initialization.
The “Auto tune” window pops up after the
phase initialization is completed. Use
and to drive the motor to continue
moving. Confirm that the motor moves far
from the hard stop.
After that, click the “Proceed” button to
start auto tuning. Click the “Close” button
to close the window after tuning has been
completed. Now, the auto phase
initialization is completed and the test-run
function can be performed.
Note 1: Observe whether status lights of
and are
green or not, to check if the phase
initialization is done successfully and
the servo close-loop control is ready.
Note 2: The status light of
flashes green during the process of
auto gain tuning. After the auto tuning
is completed, it keeps green. When
the auto tuning is failed, it keeps red.
In this case, close the “Auto tune”
window and repeat Step 2.
Confirming the movement direction and
setting toggle direction:
After performing jog in Step 2, if the motor
moves in the direction opposite to the
user-defined direction, close the “Auto
tune” window and open the “toggle
direction” window via steps in the left
figure. Click the “Toggle” button in the
window to complete the setting of reverse
direction. Repeat Step 2 again.
Note: When the motor is used in the
vertical axis, if there is no mechanical
braking mechanism, executing the
toggle direction may cause a slipping
phenomenon of motor, since the
motor will be disabled at the toggle
direction.
 Loading...
Loading...
