D2 Drive User Guide v1.8 3. Operation Principles
HIWIN Mikrosystem Corp. 34
3.7. Move and settling
The motor moves based on the path planned by the host controller. When it arrives at the
target position, it is able to position accurately and stop motion. This is called move and
settling.
(1) Position error
In the servo system, there is a certain difference between the target position and the
encoder feedback position. This is called position error.
(2) Target radius
After the motor arrives at the target position, the difference between the feedback position
and the target position must be controlled and kept within a specific positive/negative
small range. This range is called target radius.
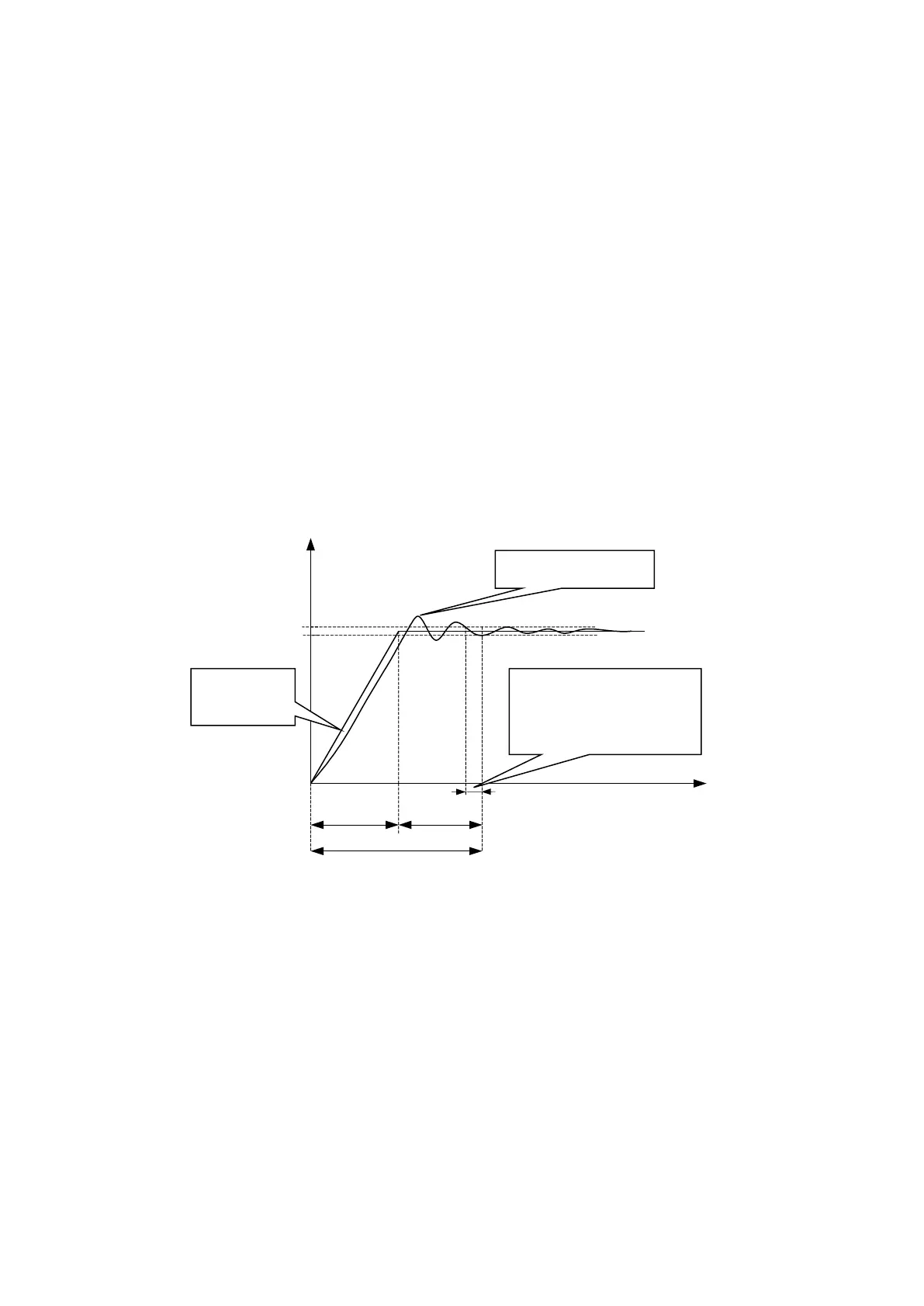
(3) Total time of move and settling
As shown in Fig. 3-12, after the motor arrives at the target position, the position error
should be smaller than the setting of target radius and keep for a certain time (debounce
time). After that, the “In-position” signal is set and called in position. If the position error is
continuously out the radius, it is called not yet in position. The total time spent from the
motion start to the settling achievement is the amount of move time and settling time.
Fig. 3-12
arget
position
After entering the radius
for a debounce time,
send out the
 Loading...
Loading...
