D2 Drive User Guide v1.8 8. Protection Function
HIWIN Mikrosystem Corp. 234
8.1. Motion protection
The main function of motion protection is to limit or specify the maximum speed, maximum
acceleration, maximum deceleration, emergency stop deceleration of motor output during
motor movement. When the speed and acceleration corresponding to the pulse command or
voltage command sent from the host controller are too high, the protection function is
activated and the motion characteristic is limited to the set value. The drive has various
protection functions for different operation modes. The following is applicable parameters for
each operation mode.
Table 8-1
Limit parameter
Operation mode
Emergency stop
deceleration
Note. “O” means it is active, and “X means it is inactive.
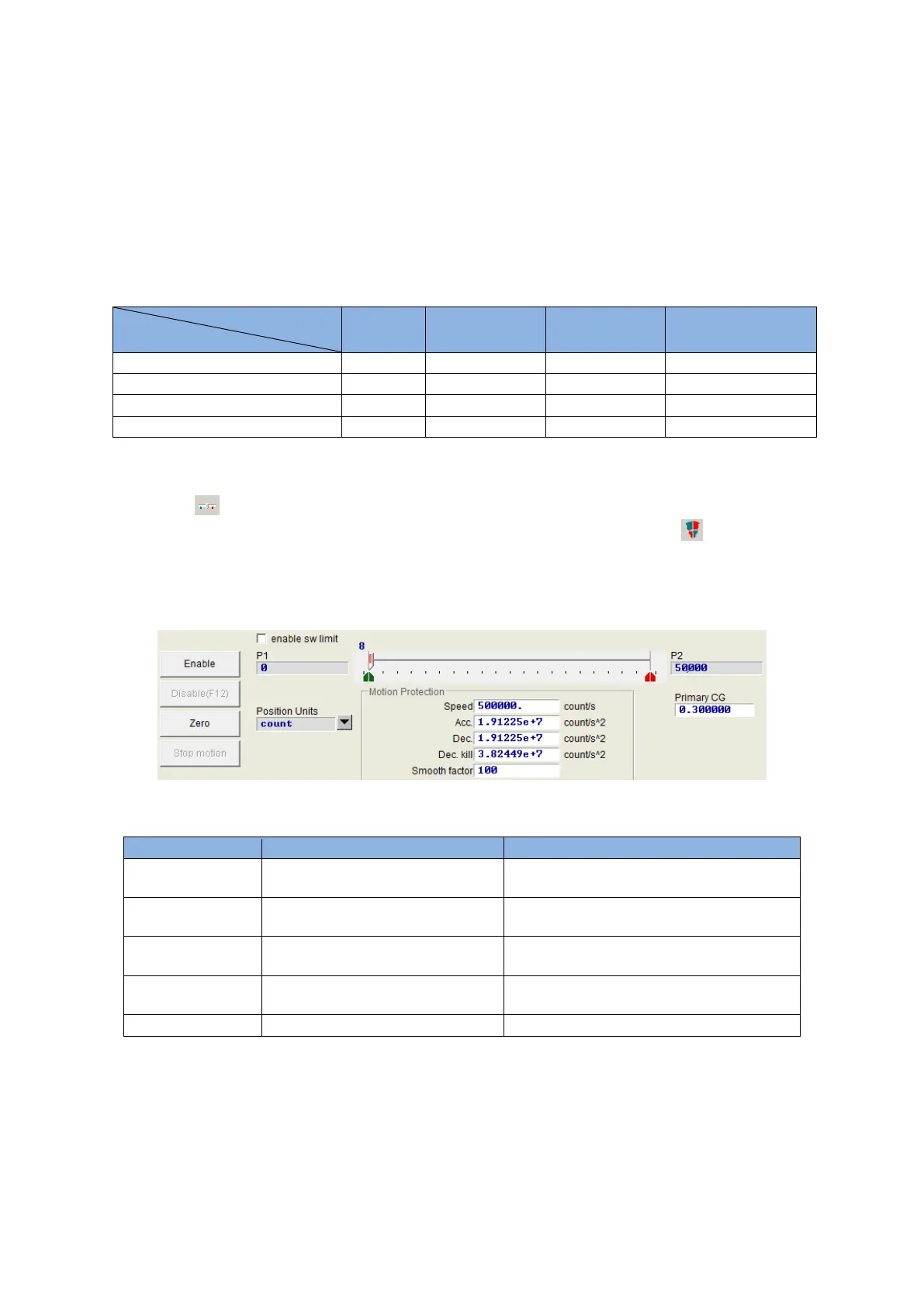
(1) Speed, acceleration, and deceleration limitations
Click to enter the performance center to display the configuration page for the motion
protection, as shown in the following figure. In addition, clicking can enter the
protection center to observe the same setting of motion protection in the “Motion
Protection” area on the “Protection” tab. However, this area can only be displayed, but not
be modified.
Fig. 8-1
Table 8-2
Set the maximum velocity of
motor during motion
AC servo motor: 3,000 rpm
Set the maximum acceleration of
motor during motion
AC servo motor: 1/2 * (Kt * Ip / (10 * Jm))
Set the maximum deceleration of
motor during motion
AC servo motor: 1/2 * (Kt * Ip / (10 * Jm))
Set the deceleration of motor for
emergency stop
Note. Jm is the moment of inertia obtained by the inertia estimation.
As shown in Fig. 8-1, the “Motion Protection” area displays the maximum speed, maximum
acceleration, and maximum deceleration of movement. The unit can be set according to the
user’s custom unit by clicking “Position Units”. These settings are not only used for the motion
protection, but also used as test run parameters. Therefore, when the motion function (“P2P”,
“Relative move”, or “Jog”) in the performance center is used, it is important to check whether
the data in the “Motion Protection” area is the user’s motion protection setting, as shown in
Fig. 8-2. In the position mode or velocity mode, be sure to set “Acc.” and “Dec.” to the required
 Loading...
Loading...
