D2 Drive User Guide v1.8 3. Operation Principles
HIWIN Mikrosystem Corp. 27
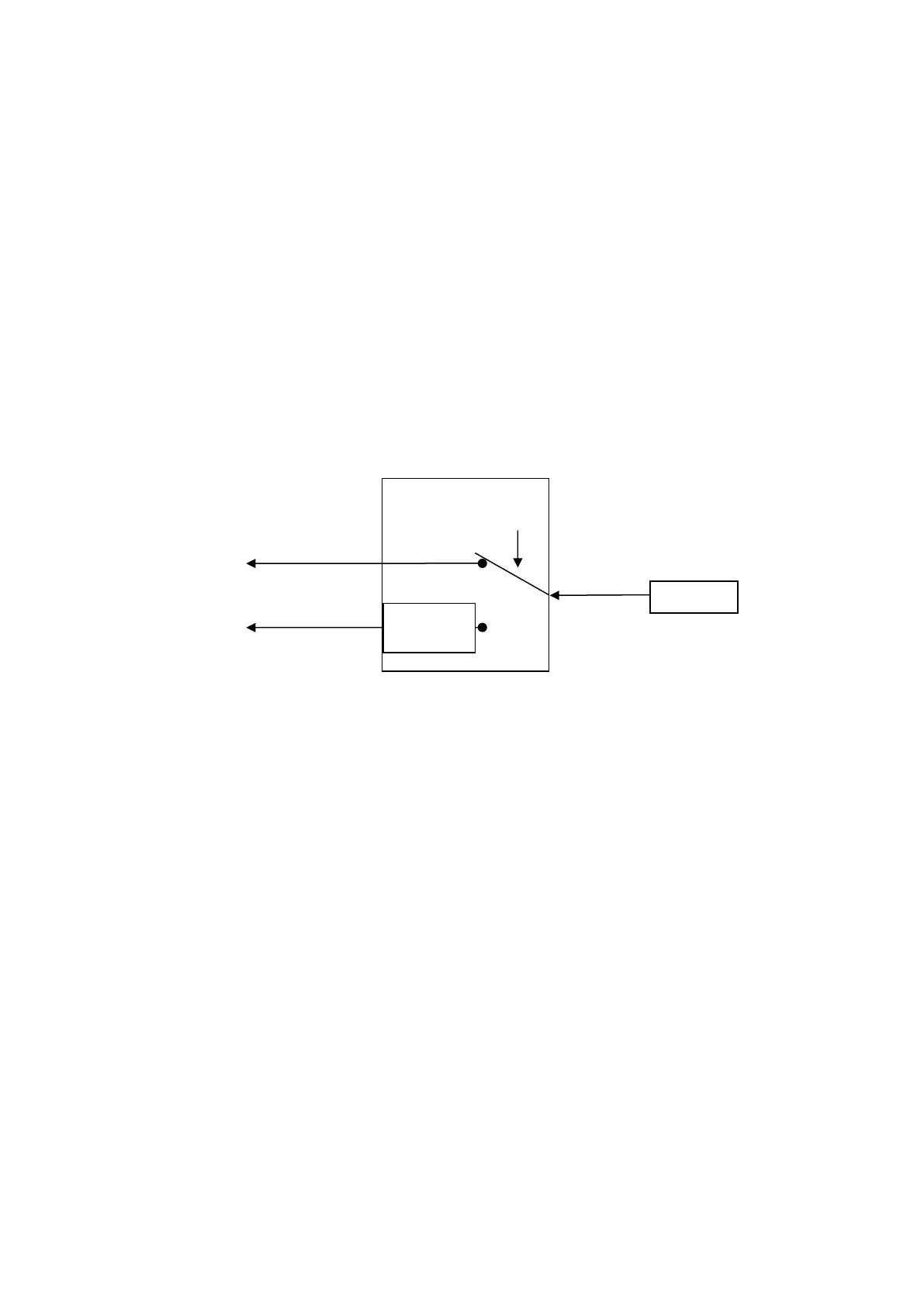
3.3. Encoder signal output
The input signal of encoder is used to perform the servo control by the servo drive. When the
drive works with the host controller, the host controller also has the requirement of receiving
position signal. Normally, the drive will transmit the position or angle signal received from the
encoder to the host controller. D2 drive provides the following two modes of encoder output.
(1) Buffered encoder output
When this mode is selected, the drive sends the received encoder signal to the host
controller directly. Besides, if the invert of encoder signal is required, check the option of
invert function. At this time, the drive inverts the received encoder signal and sends it out.
(2) Emulated encoder output
When this mode is selected, the drive multiplies the received encoder position by a scale
and sends it out to the host controller. For some cases, if the host controller cannot
receive the encoder signal with a too high frequency, the scale can be set to lower the
frequency of encoder output. In addition, if the multiplier factor of analog encoder is set
too high, the scale can also be set to lower the resolution of encoder output.
Fig. 3-4
Encoder
Encoder
Output
 Loading...
Loading...
