D2 Drive User Guide v1.8 6. Drive Tuning
HIWIN Mikrosystem Corp. 173
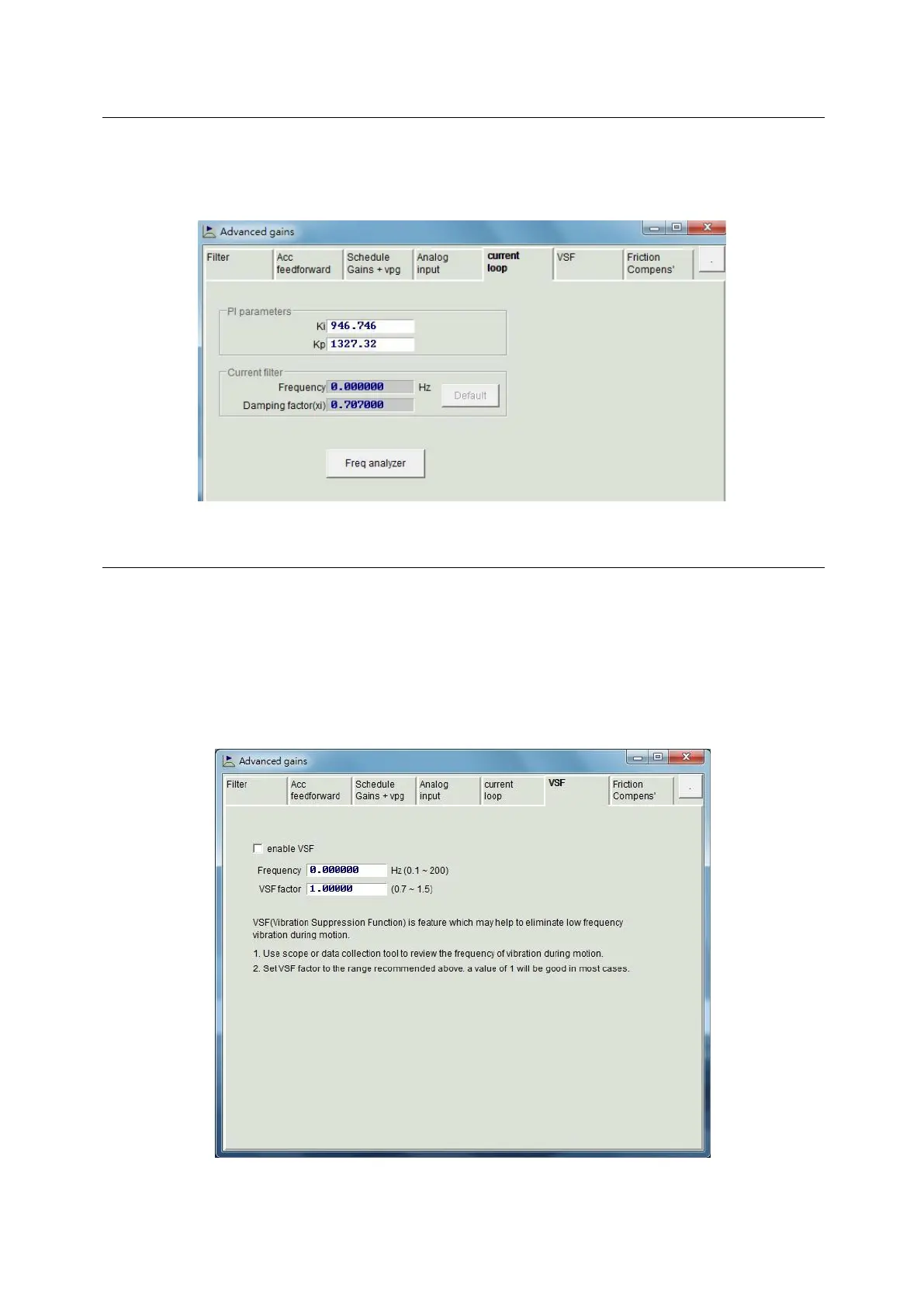
6.6.5. Current loop
Gain values of current loop, “Ki” and “Kp”, are basically calculated according to motor
parameters when the motor model is selected in the configuration center. They are usually not
required for further adjustment. However, if the motor parameter is not set correctly, this
function can be used to adjust.
Fig. 6-36 Current loop
6.6.6. Vibration suppression feature
The vibration suppression feature (VSF) is used to suppress the vibration generated by the
motor during the movement. Especially when the load of mechanism is the cantilever, the
vibration is particularly evident. Through the “VSF” tab in the “Advanced gains” window, the
effect of vibration suppression can be achieved by setting “Frequency” and “VSF factor”, and
checking the “enable VSF” option. The setting range of “Frequency” is 0.1 - 200 Hz, and the
range of “VSF factor” is 0.7 - 1.5. Generally, the value of “VSF factor” is recommended to be
1.0, same as the default value. Note that “enable VSF” cannot be checked or unchecked while
the motor is moving; otherwise the motor will generate an unexpected vibration and error.
Fig. 6-37 Vibration suppression feature (VSF)
 Loading...
Loading...
