D2 Drive User Guide v1.8 3. Operation Principles
HIWIN Mikrosystem Corp. 28
3.4. Path planning
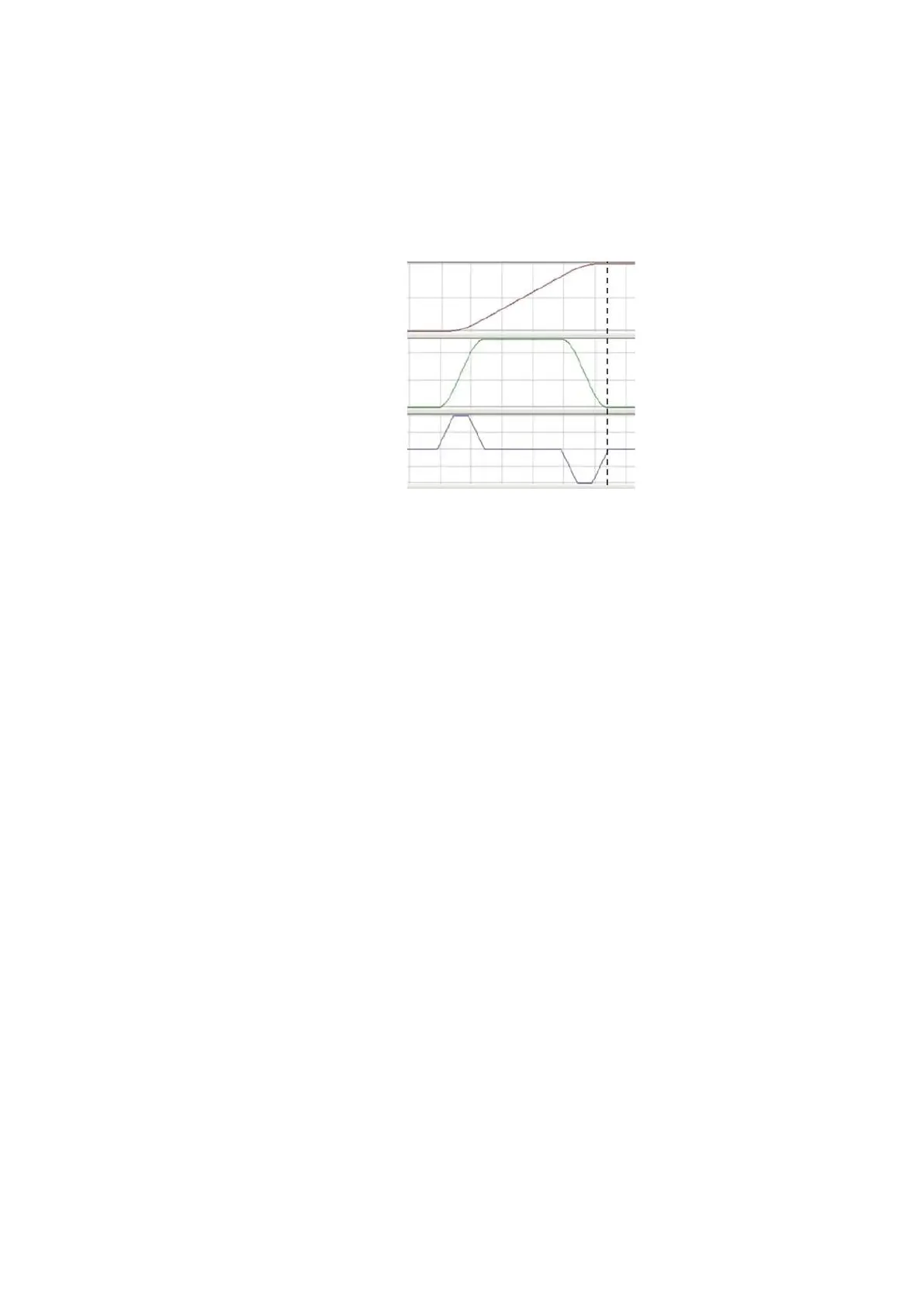
The main purpose of path planning is that the host controller calculates the suitable motion
command based on the user’s actual requirement of distance, velocity, acceleration, and
smooth factor, as shown in Fig. 3-5. This command (pulse or V command) is sent to the drive
by the host controller, or calculated by the drive itself (stand-alone mode). Different
configurations are adopted according to different applications.
Fig. 3-5
(1) Position
The encoder provides the position information of motor to the drive, such that the drive
can realize the current motor position. For the linear motion, common position units are
um, mm, and m; while for rotary motion, it is the encoder count. For D2 drive, “Reference
position” denotes the position command, which is calculated by the path generator based
on the related parameters. However, “Target position” is the target position set by the
user or host controller. After this parameter is sent to the drive, normally, it needs to be
calculated by the path generator so as to let motor move.
(2) Velocity
The velocity is defined as the difference of position per unit time. For linear motion,
velocity units are um/sec, mm/sec, m/sec; while for rotary motion, they are count/sec, rps,
and rpm.
(3) Acceleration
The acceleration is defined as the difference of velocity per unit time. For linear motion,
acceleration units are um/sec
2
, mm/sec
2
, and m/sec
2
; while for rotary motion, it is rps
2
.
(4) Smooth factor
When the acceleration is rapidly increased or decreased in a short time, it means that the
force applied to moving object is suddenly increased or decreased. Sometimes, to reduce
such impact, the technique of smooth motion is introduced to the motion control loop, so
as to enhance the performance. D2-serise drives adopt the technique of smooth factor to
achieve this effect. By using the smooth factor, the motion trajectory can be planned to
S-type or T-type curve. Its value can be set from 0 to 500. If this value is larger, the
trajectory is closer to S-Type curve and the impact is smaller. On the other hand, if this
value is smaller, the trajectory is closer to T-Type curve. As this value being 1, it means
that there is no effect of smooth function. When the value of smooth factor is increased, in
some case, the settling performance during positioning process will be enhanced, since
the impact of motor force is reduced. However, when the motion becomes smoother, the
move time of path planning is unavoidably increased. Tests on the practical machine are
needed to adjust the smooth factor, so as to get the balance between them. As the
smooth factor is set to 0, the motion protection of drive is disable.
 Loading...
Loading...
