D2 Drive User Guide v1.8 6. Drive Tuning
HIWIN Mikrosystem Corp. 169
Step 6. Dividing the value obtained in Step 4 by the value obtained in Step 5,
Acc feedforward gain = Command Current/Reference Acceleration
= 16/950,000 =1.68421*10
-5
.
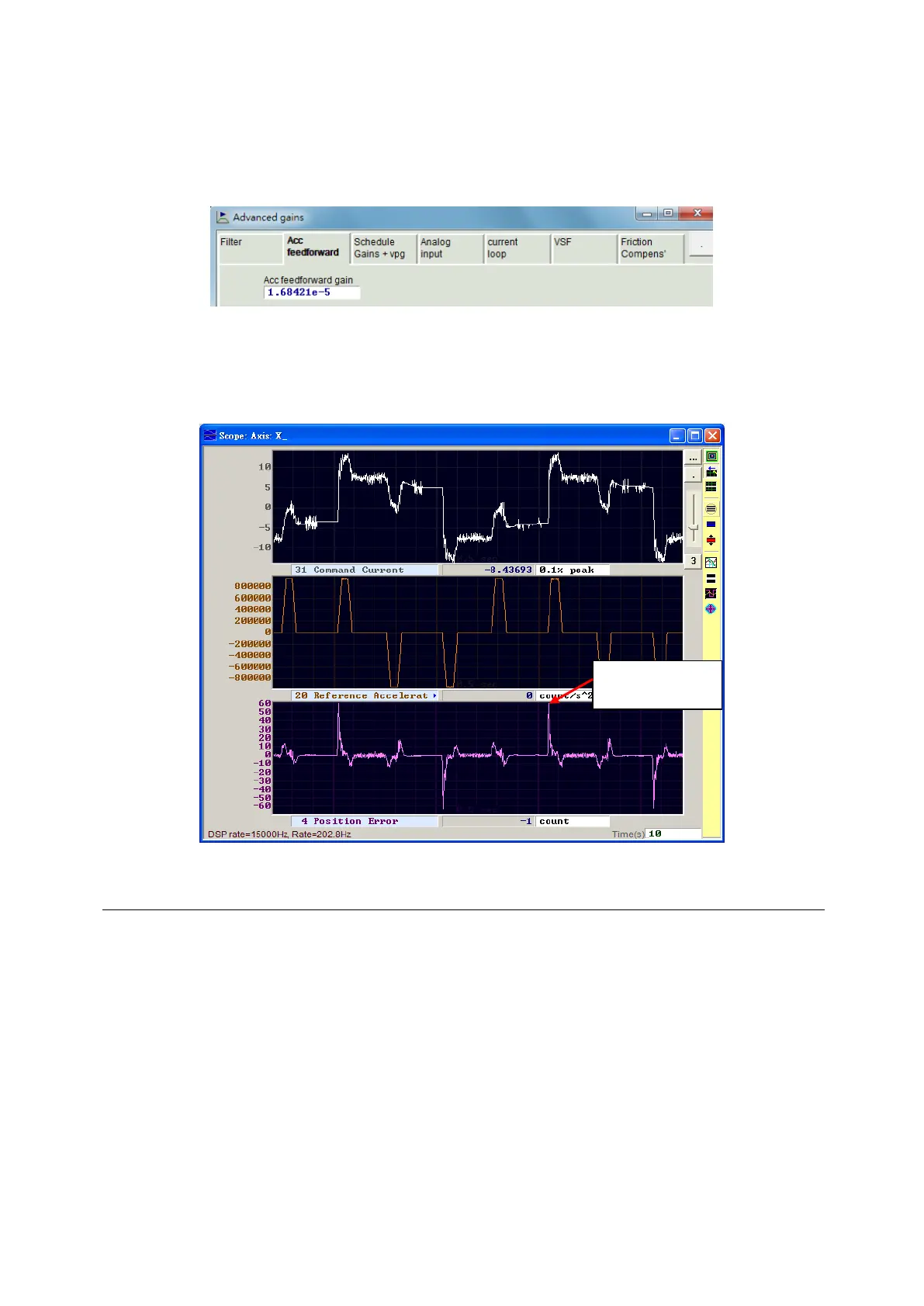
Step 7. Enter the result obtained in Step 6 into the “Acc feed forward gain” field, as shown in
Fig. 6-29.
Fig. 6-29 Acceleration feed-forward gain
Step 8. Observe whether “Position Error” is reduced. As shown in Fig. 6-30, the position
error in the acceleration phase is decreased from 90 counts in Fig. 6-28 to 65
counts.
Fig. 6-30 Result of adding acceleration feed-forward
6.6.3. Schedule gains and velocity loop gain
(1) Schedule gains
A complete motion can be roughly divided into three phases (see Section 3.7):
a. Move: From the start to the end of path planning.
b. Settling: From the end of path planning to the in-position phase.
c. In-position: Output an in-position signal.
The main purpose of “Schedule gain” is to adjust the output servo stiffness of each motion
phase (“Move”, “Settling”, “In-position”) by changing the servo gain. The gain of each
phase is adjusted in proportion. When it is set to 1, it means that the original servo gain is
used. When it is less than 1, the gain of this phase is lowered. The corresponding
parameter of each phase is given as follows.
a. Move: sg_run.
b. Settling: sg_stop.
c. In-position: sg_idle.
“Position Error”
is 65 counts.
 Loading...
Loading...
