5-23
5-10 Brake Interlock
5
Operating Functions
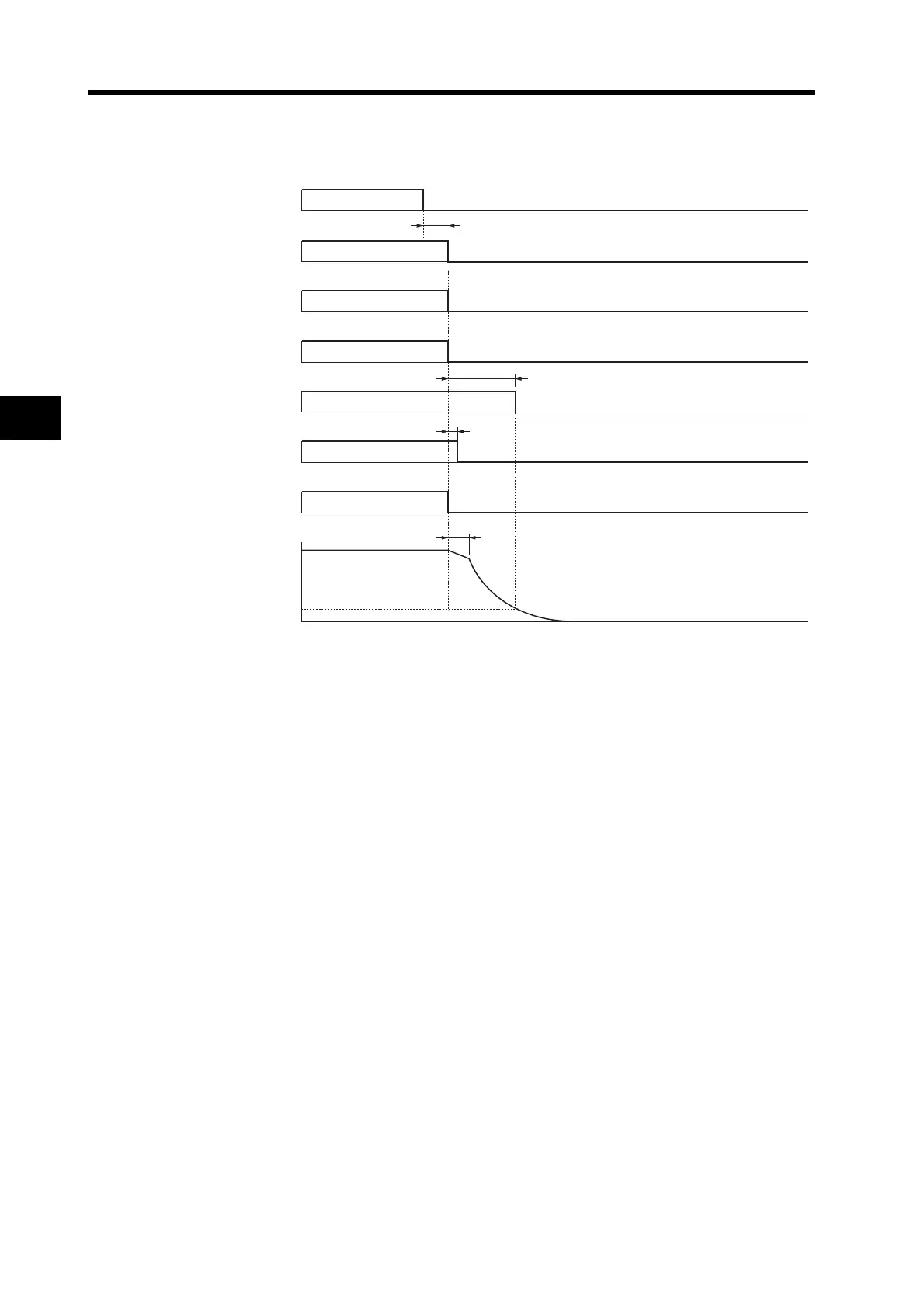
RUN Command, Errors, and Power Supply OFF Timing (When Servomotor Is
Rotating)
*1. After the Servomotor is deenergized, it will rotate by inertia for approximately 10 ms until the
dynamic brake operates.
*2. The Brake Interlock (BKIR) signal will turn OFF when the Servomotor’s rotation speed is
30 r/min. or lower, or the time set in the Brake Timing during Operation (Pn6B) has elapsed.
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Power supply
Brake Interlock (BKIR)
Servomotor
Energized
Deenergized
25 to 35 ms
(Pn6B *2)
Approx. 1 to 5 ms
Approx. 10 ms (*1)
Servo Ready (READY)
RUN Command (RUN)
Alarm Output (/ALM)
Dynamic brake
Servomotor rotation speed
Released
Engaged
Braking using dynamic brake

 Loading...
Loading...

