5-38
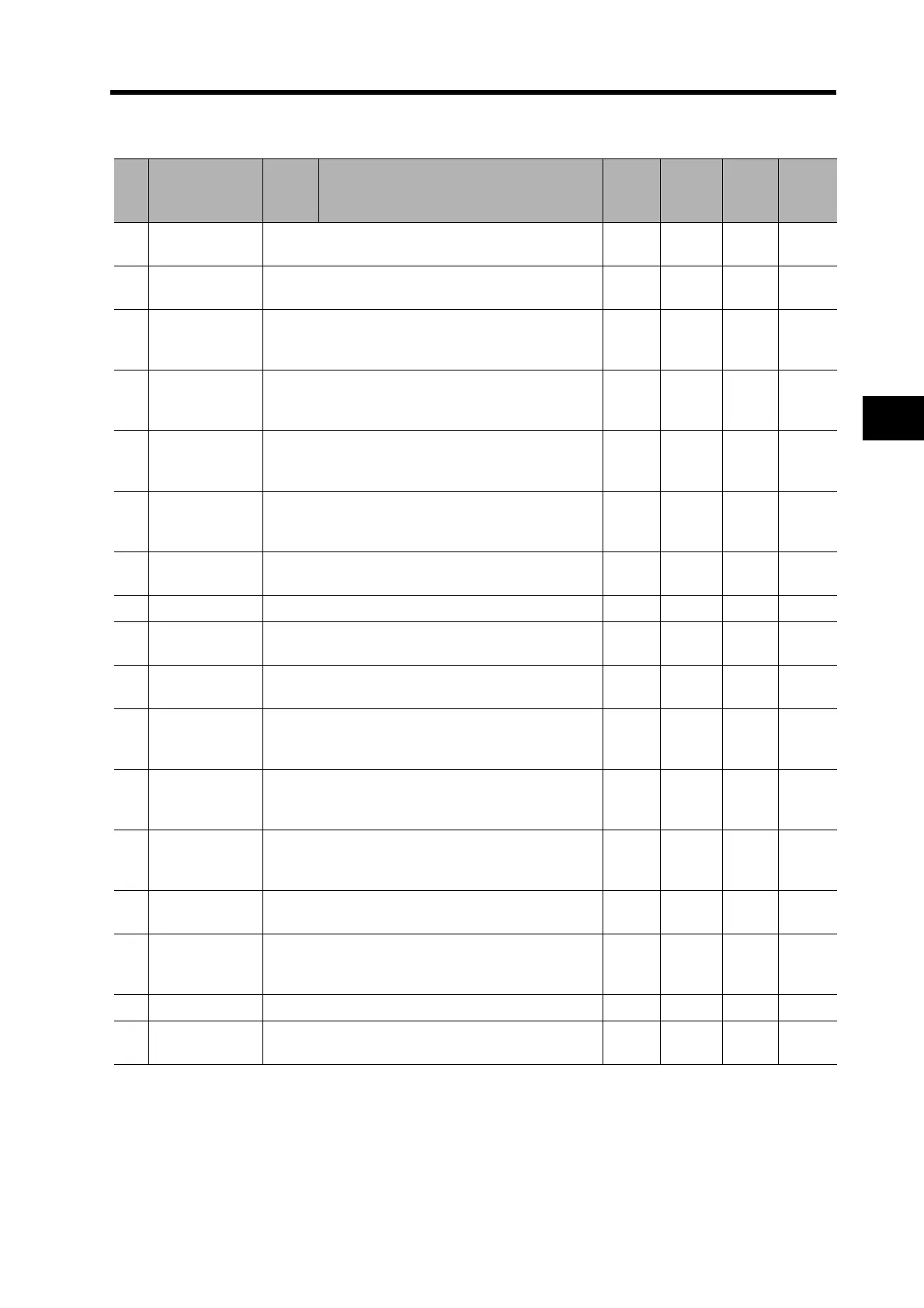
5-16 User Parameters
5
Operating Functions
Gain Parameters
Pn
No.
Parameter
name
Setting Explanation
Default
setting
Unit
Setting
range
Power
OFF→
ON
10
Position Loop
Gain
Set to adjust position control system responsiveness. 40 1/s
0 to
3000
---
11
Speed Loop
Gain
Set to adjust speed loop responsiveness. 50 Hz
1 to
3500
---
12
Speed Loop
Integration Time
Constant
Set to adjust the speed loop integration time constant. 20 ms
1 to
1000
---
13
Speed
Feedback Filter
Time Constant
The encoder signal is converted to the speed signal
via the low pass filter.
0 --- 0 to 5 ---
14
Torque
Command Filter
Time Constant
Set to adjust the first-order lag filter time constant for
the torque command section.
80 0.01 ms
0 to
2500
---
15
Feed-forward
Amount
Set the position control feed-forward compensation
value.
300 0.1%
−2000
to
2000
---
16
Feed-forward
Command Filter
Set the time constant of the first-order lag filter used
in the speed feed-forward section.
100 0.01 ms
0 to
6400
---
17 Reserved (Do not change setting.) --- --- --- ---
18
Position Loop
Gain 2
Set to adjust position control system responsiveness. 20 1/s
0 to
3000
---
19
Speed Loop
Gain 2
Set to adjust speed loop responsiveness. 80 Hz
1 to
3500
---
1A
Speed Loop
Integration Time
Constant 2
Set to adjust the speed loop integration time constant. 50 ms
1 to
1000
---
1B
Speed
Feedback Filter
Time Constant 2
The encoder signal is converted to the speed signal
via the low pass filter.
0 --- 0 to 5 ---
1C
Torque
Command Filter
Time Constant 2
Set to adjust the first-order lag filter time constant for
the torque command section.
100 0.01 ms
0 to
2500
---
1D
Notch Filter 1
F
requ
ency
Set the notch frequency of the resonance suppres-
sion notch filter.
1500 Hz
100 to
1500
---
1E
Notch Filter 1
Width
Set the width to one of five levels for the resonance
suppression notch filter. Normally, use the default set-
ting.
2 --- 0 to 4 ---
1F Reserved (Do not change setting.) --- --- --- ---
20 Inertia Ratio
Set the ratio between the mechanical system inertia
and the Servomotor rotor inertia.
300 %
0 to
10000
---

 Loading...
Loading...

