7-12
7-2 Realtime Autotuning
7
Adjustment Functions
Automatically Set Parameters
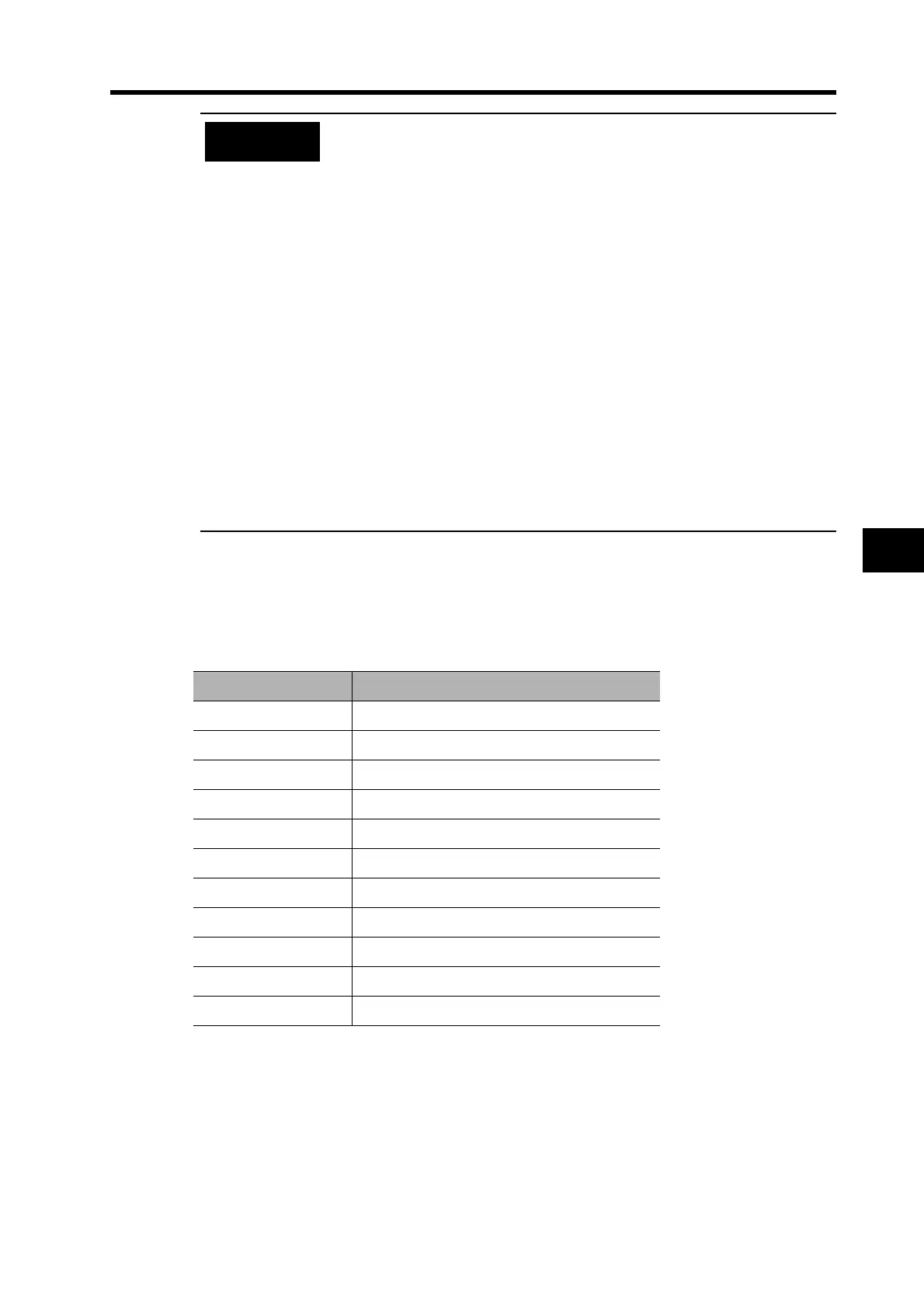
The following parameters are set automatically.
• An unusual noise or vibration may occur until the adaptive filter stabilizes
after startup, immediately after the first servo ON, or when the Realtime
Autotuning Machine Rigidity Selection (Pn22) is increased, but this is not
a problem if it disappears right away. If the unusual noise or vibration,
however, continues for three or more reciprocating operations, take one or
more of the following measures.
• Write the parameters used during normal operation to the EEPROM.
• Lower the Realtime Autotuning Machine Rigidity Selection (Pn22).
• Disable the adaptive filter by setting the Adaptive Filter Selection (Pn23)
to 0 (resetting the inertia estimation and the adaptive operation).
• Manually set the notch filter.
• Once unusual noise or vibration occurs, the Adaptive Filter Table Number
Display (Pn2F) may have changed to an extreme value. In this case, also
take the measures described above.
• The Adaptive Filter Table Number Display (Pn2F) is written to the
EEPROM every 30 minutes, and when the power supply is turned OFF
and turned ON again, this data is used as the initial values for the adaptive
operation.
• The adaptive filter is normally disabled when torque control is performed,
but the adaptive filter frequency used in the control mode before switching
will be held if torque control has been selected by setting the Control Mode
Selection (Pn02) to 4 or 5.
Parameter No. Parameter name
Pn10 Position Loop Gain
Pn11 Speed Loop Gain
Pn12 Speed Loop Integration Time Constant
Pn13 Speed Feedback Filter Time Constant
Pn14 Torque Command Filter Time Constant
Pn18 Position Loop Gain 2
Pn19 Speed Loop Gain 2
Pn1A Speed Loop Integration Time Constant 2
Pn1B Speed Feedback Filter Time Constant 2
Pn1C Torque Command Filter Time Constant 2
Pn20 Inertia Ratio
Precautions
for Correct Use

 Loading...
Loading...

