7-5
7-2 Realtime Autotuning
7
Adjustment Functions
Realtime Autotuning Setting Method
1. Stop the Servomotor (i.e., turn the servo OFF).
2. Set the Realtime Autotuning Mode Selection (Pn21) to 1 to 7.
The default setting is 1.
When the degree of load inertia change is high, set the value to 3 or 6.
Use a setting of 4 to 6 when the vertical axis is used.
Use setting 7 if vibration occurs due to gain switching.
3. Set the Realtime Autotuning Machine Rigidity Selection (Pn22) to 0 or a low value.
4. Turn the servo ON, and operate the machine as normally.
5. To increase system responsiveness, gradually increase the setting of the Realtime
Autotuning Machine Rigidity Selection (Pn22).
If the machine produces unusual noise or oscillation, return the Realtime Autotuning Machine
Rigidity Selection to a low value (e.g., 0 to 3) immediately.
6. Write data to the EEPROM if the results are to be saved.
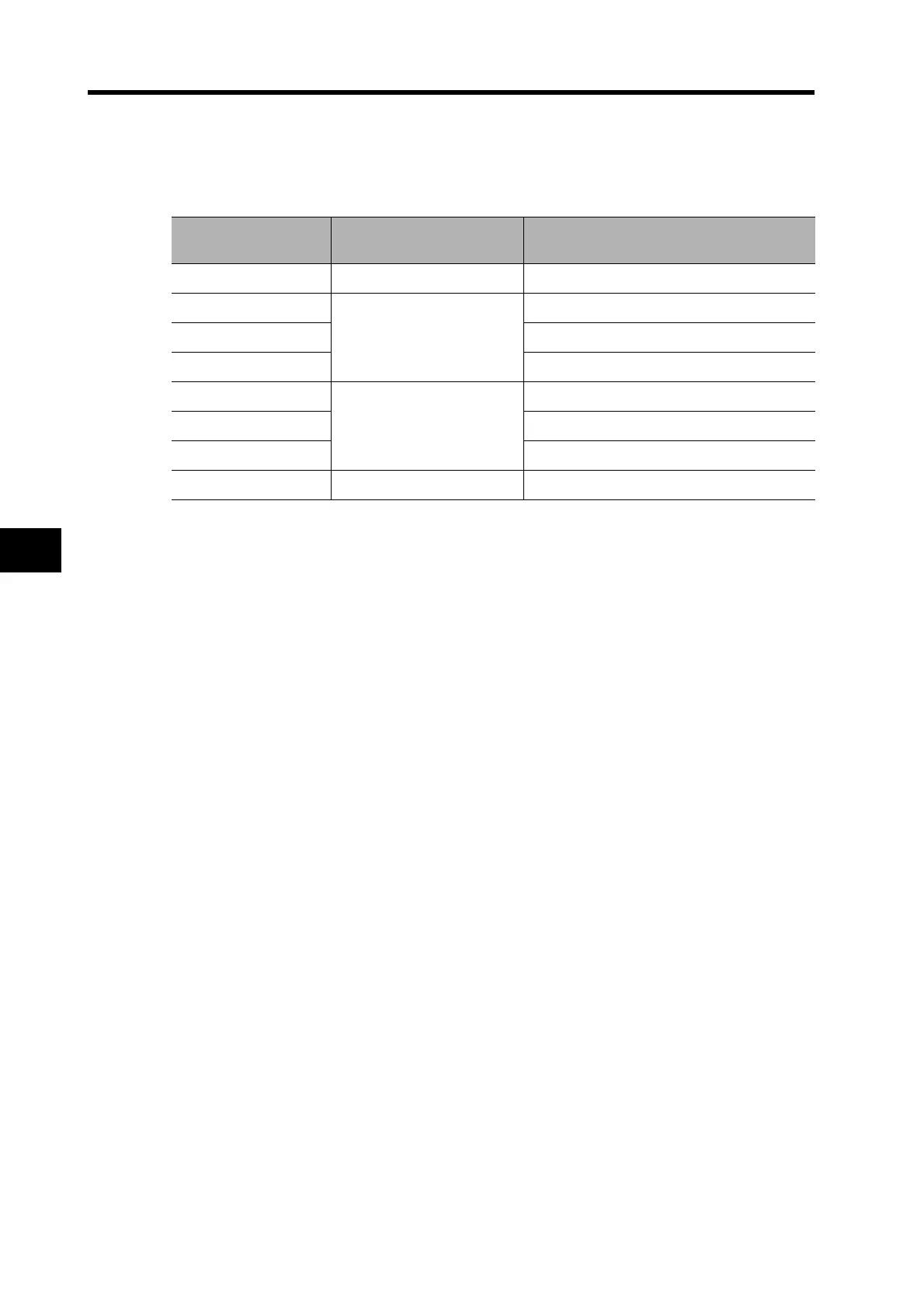
Setting Realtime Autotuning
Degree of change in load inertia during
operation
0 Not used ---
1
Normal mode
No change in load inertia
2 Gradual changes in load inertia
3 Sudden changes in load inertia
4
Vertical axis mode
No change in load inertia
5 Gradual changes in load inertia
6 Sudden changes in load inertia
7 No gain switching mode No change in load inertia

 Loading...
Loading...

