Thelinearizationprocesswillstartautomaticallyafteryourvesselhasturnedappro ximately100°ata
speedofbetween3–15knots.Linearizationrequiresnouserinput,howeveratleasta270°turn
isrequiredbeforelinearizationcancomplete.Theprogressbarwillfilltoindicateprogress,the
progressbarwillturnRediftheprocessispausedorotherwiseinterrupted.Timeittakestocomplete
thelinearizationwillvaryaccordingtothecharacteristicsofthevessel,theinstallationenvironmentof
theEVunit,andthelevelsofmagneticinterferenceatthetimeofconductingtheprocess.Sources
ofsignificantmagneticinterferencemayincreasethetimerequiredtocompletethelinearization
process.Examplesofsuchsourcesinclude:
•Marinepontoons
•Metal-hulledvessels
•Underwatercables
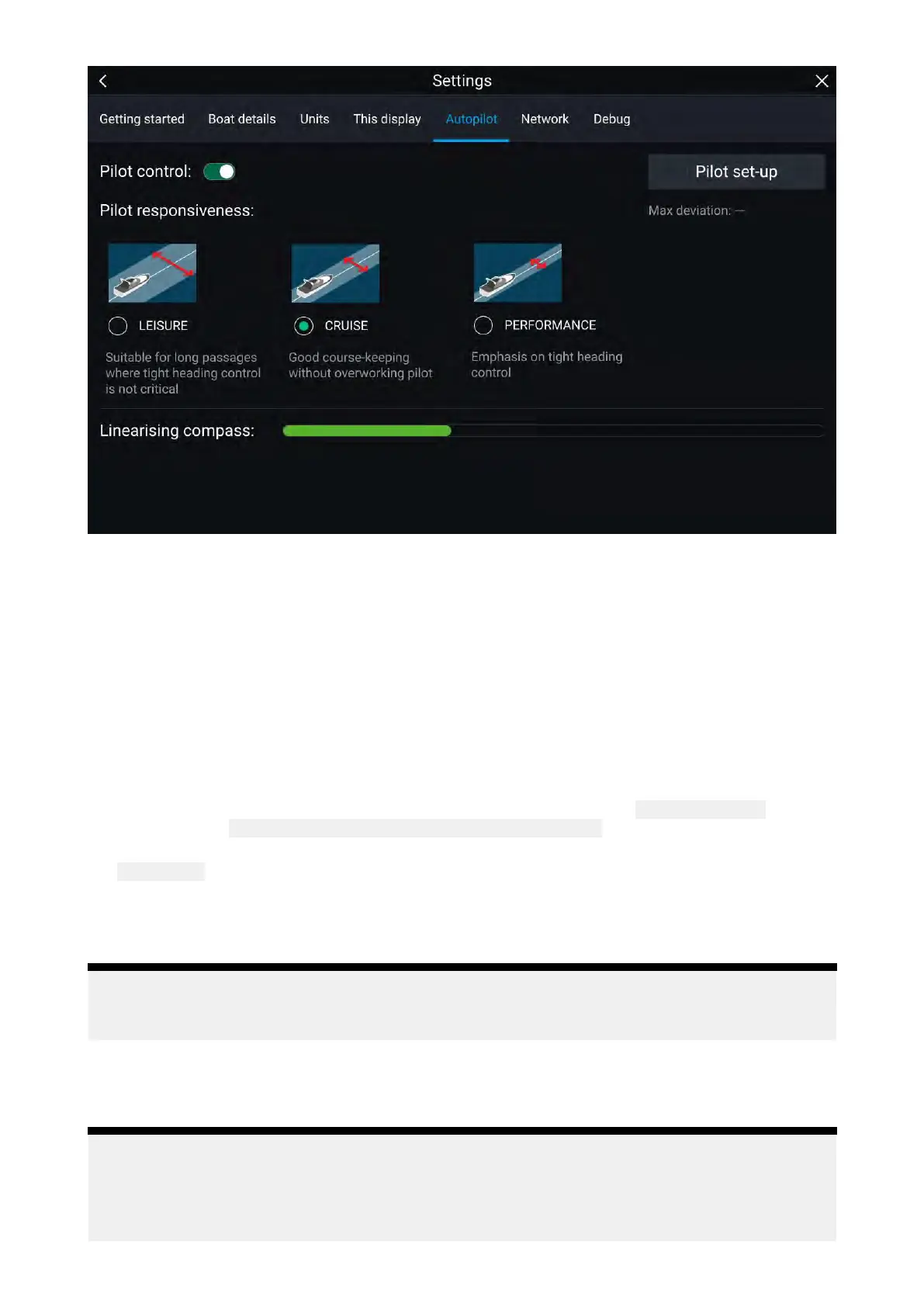
Y oucanspeed-upthelinearizationprocessbycompletingafull360°turn(ataspeedof3–15knots).
Y oucanalsorestartthelinearizationprocessatanytimebyselectingthe
RestartCompassfromthe
Pilotset-upmenu: Homescreen>Settings>Autopilot>Pilotset-up.
OncetheinitiallinearizationiscompletedtheMaximumcompassdeviationvalueisdisplayedunder
the
Pilotset-upbuttonontheAutopilotsettingspage.
Compassdeviation
Ifthereporteddeviationis45°orhigher,itishighlyrecommendedthattheEVsensorismovedand
re-installedinalocationwhichissubjecttolessmagneticinterference.
Note:
If“--”isdisplayedastheDeviationvalue ,itmeansthatlinearizationhasnotbeensuccessfully
completedyet.
Checkthecompassheadingdata
Aspartoftheautopilotsystemcommissioningprocess,itisrecommendedthatyoucheckthe
compassheadingvaluedisplayed,againstagoodknownheadingsourceonvariousheadings.
Note:
Oncethelinearizationprocesshascompleted,itispossiblethattheheadingvaluemayhavea
slightoffsetof2to3degrees.Thisiscommonwhereinstallationspaceislimited,andtheEV
sensorcannotbeproperlyalignedtothevessel' slongitudinalaxis.Inthiscase,itispossible
tomanuallyadjustthe Compassoffsetvalue.
A utopilotcontrol
101

 Loading...
Loading...