6.6Rudderdampinglevelsanddeadbandangles
Forautopilotsystemswhichincludearudderanglereferencesensor/transducer,rudderdamping
isusedtopreventEvolutionautopilotsystemover-activity
,characterizedby“hunting”maneuvers.
Anumberofrudderdampinglevelsareavailabletoaddressthisbehavior.Rudderdamping
levelsrelateto“deadbandangles”,andcanbeconfiguredusingyourautopilotcontrolhead(e.g.
p70s/p70RsorMFD).Ahigherdampinglevelisintendedtoeliminatepilotandhelmover-activity.
Typically,theappropriaterudderdampinglevelisthelowestacceptablevalue.However,itis
importanttobeawarethattherudderdampingscalinghasbeenchangedinrecentversionsofACU
units,whichincludenewerprocessorandsoftwareversions(theseunitscanbeidentifiedwithan
“A”appendedtotheirSKU).
Important:Therudderdampinglevelscanhaveasignificantimpactonyourautopilotperformance .
Ifyouareunsureastohowtoadjustthesesettingstobestsuityourautopilotsystem,pleaserefer
toyourdealerorRaymarineproductsupport.
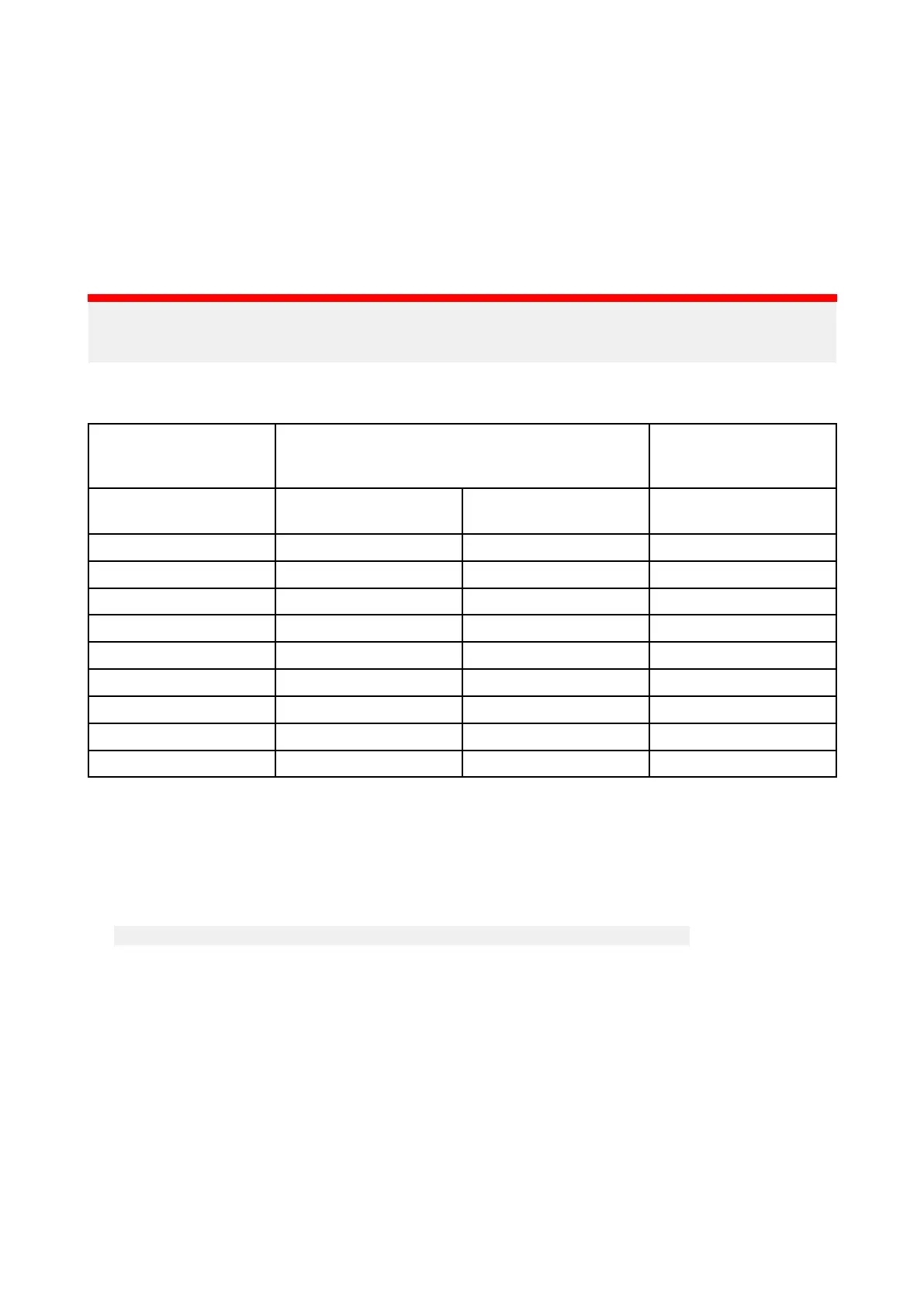
Thefollowingtableliststherudderdampinglevelsanddeadbandanglesthatareavailablewith
botholdandnewversionsoftheA CUsoftware:
RudderdampinglevelExistingDeadbandangle
NewDeadbandangle
(A
CUsoftwareversion
v3.11onwards)
ACU-100,150,200,
400
ACU-300
1
0.1°0.15°0.1°
20.2°0.30°0.2°
30.3°0.45°0.3°
4
0.4°0.60°0.4°
5
0.5°0.75°0.7°
60.6°0.9°0.9°
7
0.7°1.05°1.1°
80.8°1.20°1.6°
90.9°1.35°2.2°
It’ simportanttochecktherudderdampinglevelcurrentlyconfiguredonyourautopilotcontrolhead,
toensureitmatchesyourneeds.Therudderdampingvalueshouldbeincreasedonelevelata
timeuntiltheautopilotstopshunting.
AdjustingtheRudderDampinglevel
UsethefollowingmenupathtoadjusttheRudderDampinglevel:
1.
Homescreen>Settings>Autopilot>Advancedsettings>RudderDamping.
A utopilotcontrol
109

 Loading...
Loading...