6. Function blocks
6.1 Manufacturer function blocks
FS = Start frequency
PF = Jog frequency
A = Pulse number with
TP duty factor < 0.5 s
B = Number of pulses at TP duty factor > 0.5 s
E = Braking phase
Pulse profiles
The PO function block enables very simple pulse profiles to be generated in order to con-
trol a stepper motor with the sequences acceleration [1], operation [2] and braking [3].
In order to do this, a PO function block supplies a user-defined number of square wave
pulses (50% relative ON duration) at the permanently assigned high-speed device out-
put Q1 or Q2.
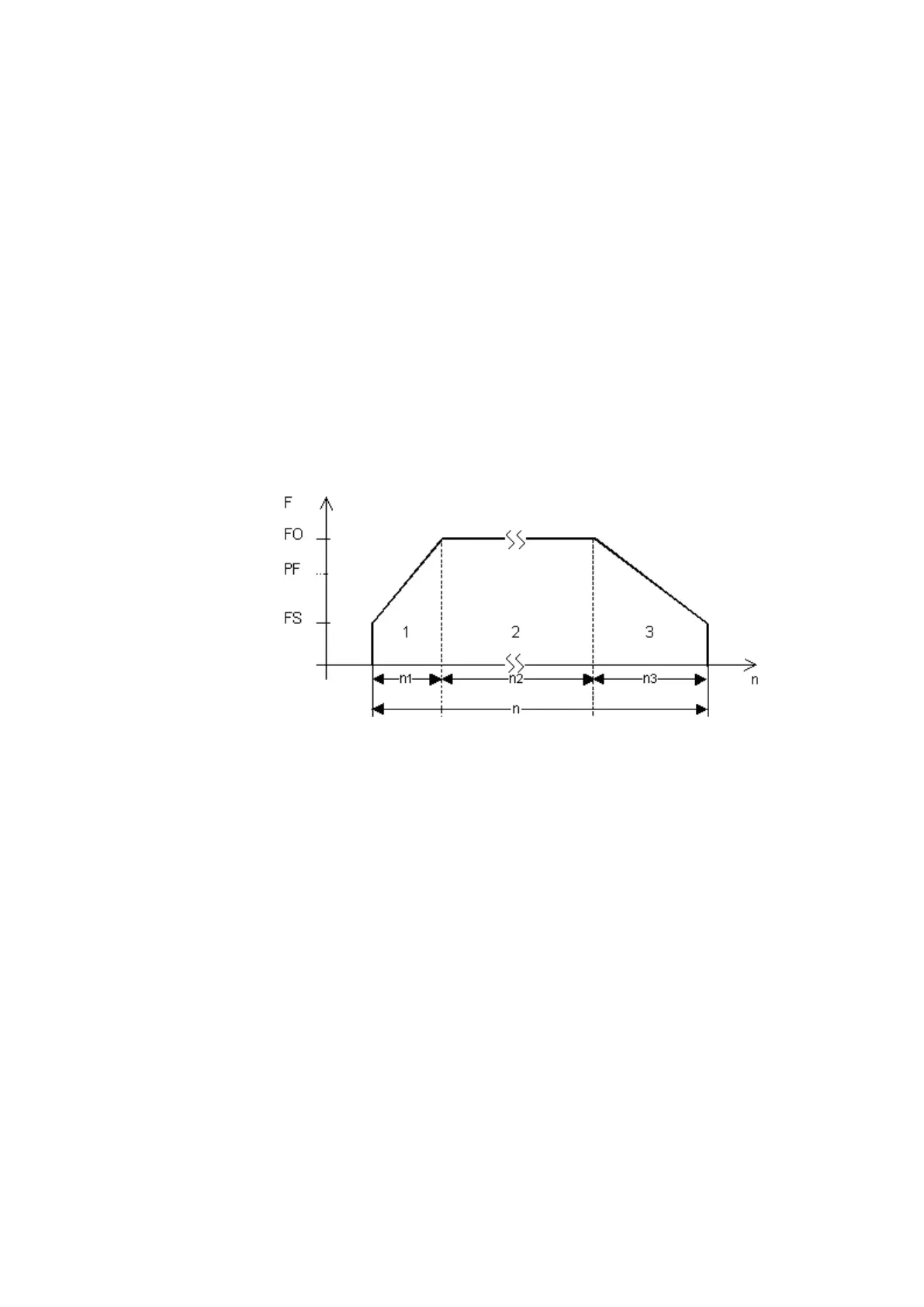
Figure 155: Typical pulse profile for a stepper motor with the acceleration [1], operation [2], and decel-
eration [3] sequences
F = frequency
1: Acceleration sequence
2: operating sequence
3: Deceleration sequence
FS: start frequency
FO: operating frequency
PF: jog frequency
t: time
Figure 156: n: Total number of pulses
n1 = Number of pulses for acceleration, n2 = Number of pulses for operation, n3 = Number of pulses for
braking
Start frequency FS
The maximum start frequency that can be configured depends on the load torque. Enter
a start frequency value that will enable the stepper motor to move the load even at low
speeds. You will normally be able to find information on the maximum start frequency
without taking the load torque into account in the technical data for the motor. When the
easyE4 11/18 MN050009 EN www.eaton.com
293
 Loading...
Loading...





