Setpoint, rotation- and ramp setting
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.4 - 21
7
Attention Ramp mode „constant time / actual setpoint“ should always be selected for acceleration and "con-
stant time / last setpoint" for deceleration.
The other adjustments are programmable and can be used if it shall be operated between diffe-
rent setpoint speeds (except 0).
When starting from 0 and/or deceleration to 0, they have the following effects:
If the mode „constant time / actual setpoint“ is selected for deceleration, deceleration is calculated
to:
Δn
Δt
actual set value
acceleration time (oP.30/oP.31)
0 rpm
deceleration time
0= = =
That means: the drive don´t decelerate, it keeps running with the last setpoint before stop com-
mand.
Minimum acceleration / deceleration is limited programatically to:
Δn / Δt = reference speed / 4800 s (reference speed dep. on ud.02 / see chapter 5)
That means: the drive would not continue to run constantly, but it decelerates very slowly.
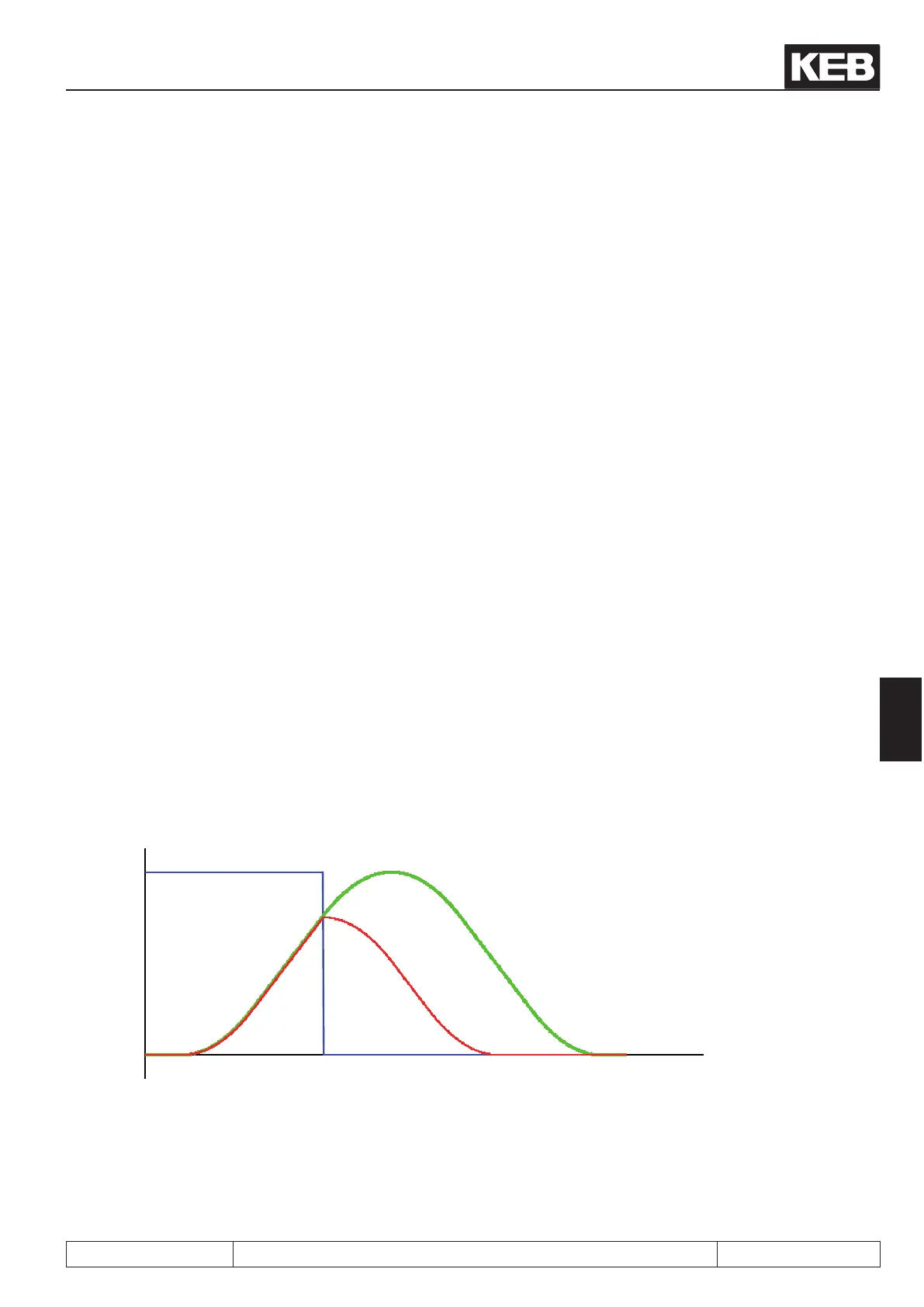
7.4.8.4 Ogive run
In the mode "constant ascent", a change in setpoint while the inverter is still in the acceleration / deceleration
phase will lead to the fastest possible response.
If the new setpoint requires e.g., a change from acceleration to deceleration, the acceleration ramp is inter-
rupted and the deceleration ramp is started immediately.
This can lead to an undened jerk.
If ogive run is selected, the programmed s-curve times are always used, the acceleration / deceleration change
continuously and no undened jerk occurs.
Figure 7.4.7.4 Ogive run
ru.01: Set value
display
ru.02:Display ramp output
with ogive run
ru.02:Display ramp output
without ogive run
 Loading...
Loading...


