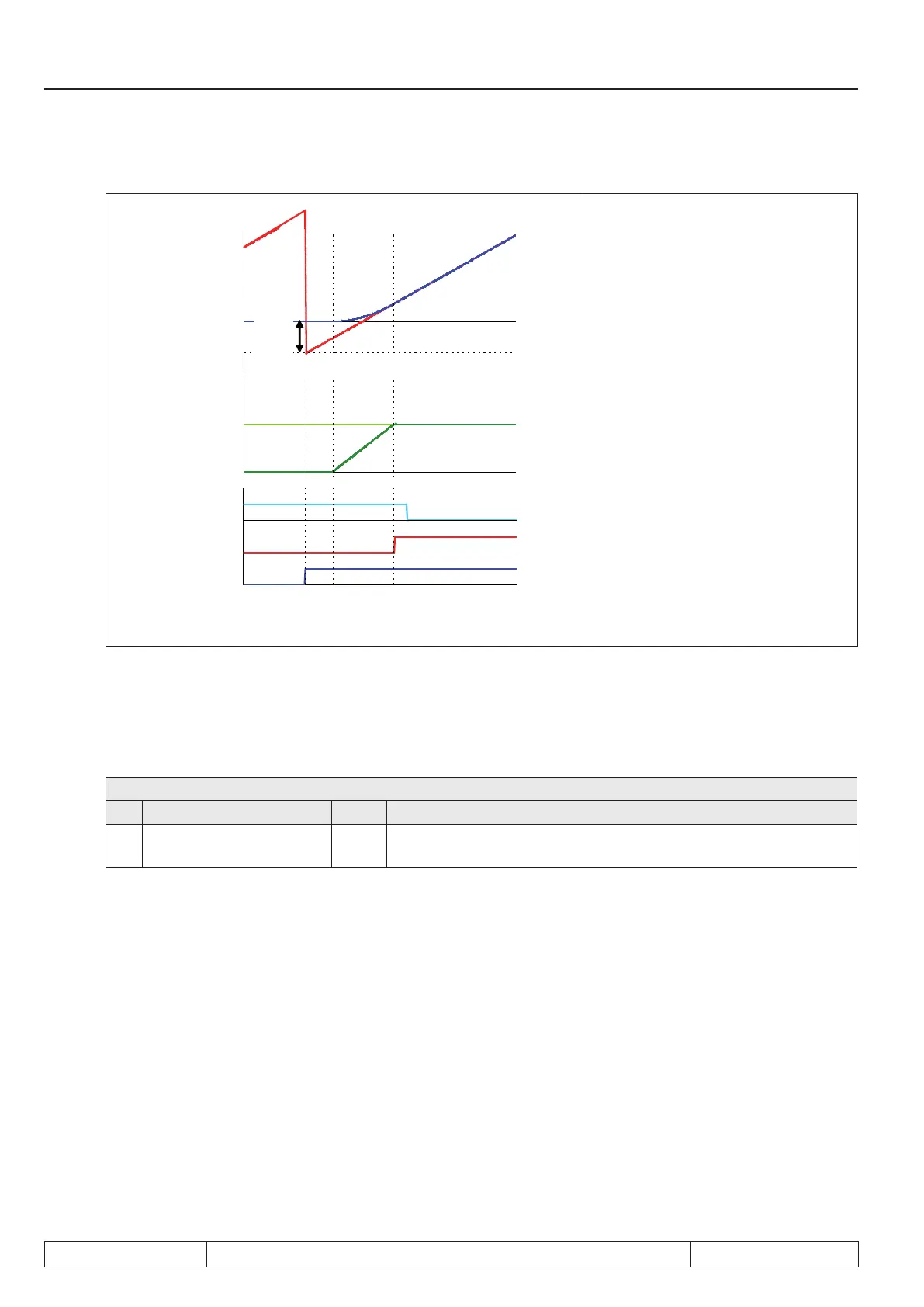
PS.05:
Start-
offset
ru.56: Set position
(master position)
ru.54: actual position
(slave position)
Actual speed master
(converted with the
gear ratio)
Actual speed slave
Angle difference >
level
Drive runs synchro-
nously
activate posi/ syn-
chronous running
time
At activation of the synchronous
module,
the set position is set to the actual
position.
The setpoint speed of the slave is set
to the actual speed of the master.
The difference to the master position
is corrected by the position controller.
Maximum speed of the slave:
Master speed + PS.09
The switching condition "drive running
synchronously" is met with activation
of the synchronous mode.
To recognize the instant at which both
drives are actually running synchro-
nously, the switching condition "angle
difference < level" must be linked with
the signal "drive running synchro-
nously".
7.12.3.5.3 Synchronization with constant path
For the synchronisation within a constant path, the starting ramp must be deactivated.
PS.00: Posi / synchronous mode
Bit Meaning Value Explanation
10
Synchronous running /
starting ramp (oP.28)
0: off
No starting ramp for synchronisation at the start of the synchro-
nous running.
The distance the master is made during synchronisation is entered in parameter PS.05 "start offset". The slave
drive calculates internally the acceleration / deceleration times on which it reaches the master speed within the
adjusted distance. , The master position is set to the slave position if the master has travelled the programmed
distance.
Example:
The master speed is 1500 rpm. The encoder type is an incremental encoder with 2500 pulses. Value "2: 4-fold"
is adjusted for "multiple evaluation".
This results in 10000 increments / revolution * 1500 U / 60s = 250000 increments/ s
If the value 250000 increments is adjusted in PS.05, the slave must accelerate to the master speed in 1s.
The disadvantages of this method of start-synchronization are described as follows:
Page 7.12 - 20 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating
 Loading...
Loading...


