Speed measurement
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.11 - 9
7
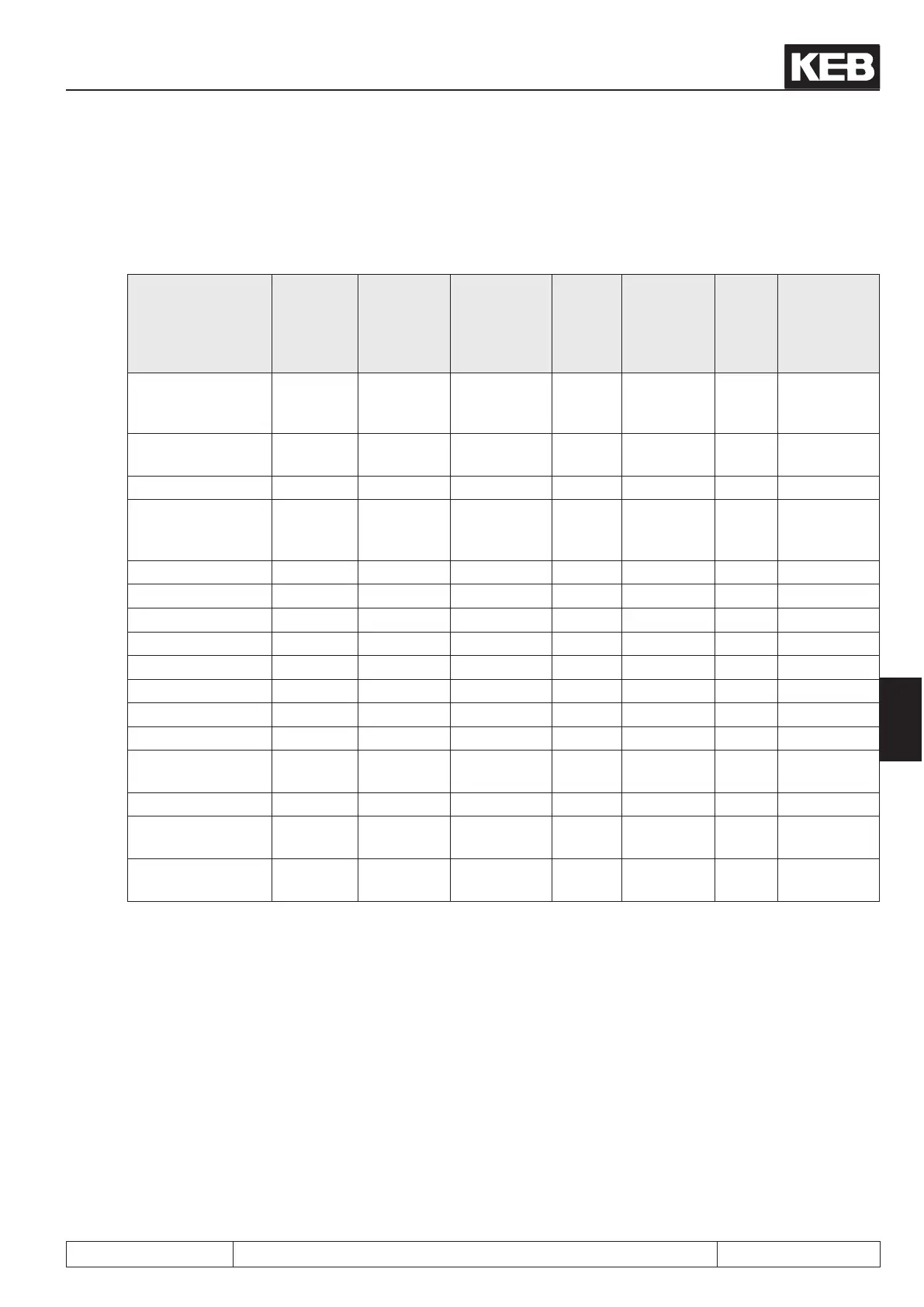
7.11.5 Selection of encoder
A condition for good control characteristics of a drive is depending on the selection and correct connection of
the encoder (see following table):
Encoder Resolution
„Speed
feedback“
„Abs. value
and rotor
position
encoder for
DSM“
Multi-
Turn
„Motor data
storable in
the enco-
der“
Number
of con-
ductors
„Max. line
length“
„Incremental TTL
with 10 - 30V
supply“
high yes no no no 8 high
„Incremental TTL
with 5V supply“
high yes no no no 8 Standard
Incremental HTL high yes no no no 8 very high
„Incremental HTL
without invers
signals“
Standard yes no no no 5 Standard
Resolver Standard yes yes no no 6 high
ENDAT very high yes yes no yes 10 high
EnDat Low cost high yes yes no yes 10 high
Endat Multiturn very high yes yes yes yes 10 Standard
EnDat 2.2 / BISS very high yes yes no yes 6 Standard
Hiperface very high yes yes no yes 6 high
Hiperface multiturn very high yes yes yes yes 6 Standard
Sin/Cos very high yes no no no 8 Standard
SIN/COS with
absolute track
very high
yes yes no no 12 Standard
SIN/COS with SSI very high yes yes no no 10 Standard
SSI Standard limited1
only abso-
lute
no no 6 Standard
SSI multiturn Standard limited1
only abso-
lute
yes no 6 Standard
1
SSI encoder often have a high time constant for the internal position detection.
Thus they are not suitable for speed measurement of dynamic systems.
Detailed data can be taken from the instruction manual of the respective encoder interface and from the data
sheet of the encoder.
 Loading...
Loading...


