Page 7.5 - 22 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Motor data and controller adjustments of the asynchronous motor
7.5.2.3.3 Generally adjustments for operation with motor model
The drive is only ready for operation after switching the modulation if the ux is build up. If one starts earlier,
the drive can display undened behaviours (erroneous torque display, too high currents, poorer controller be-
haviour).
dS.04 : Flux / rotor adaption mode
Bit Meaning Value Explanation
7
Wait for magnetisati-
on (ASM)
0: off
128: on
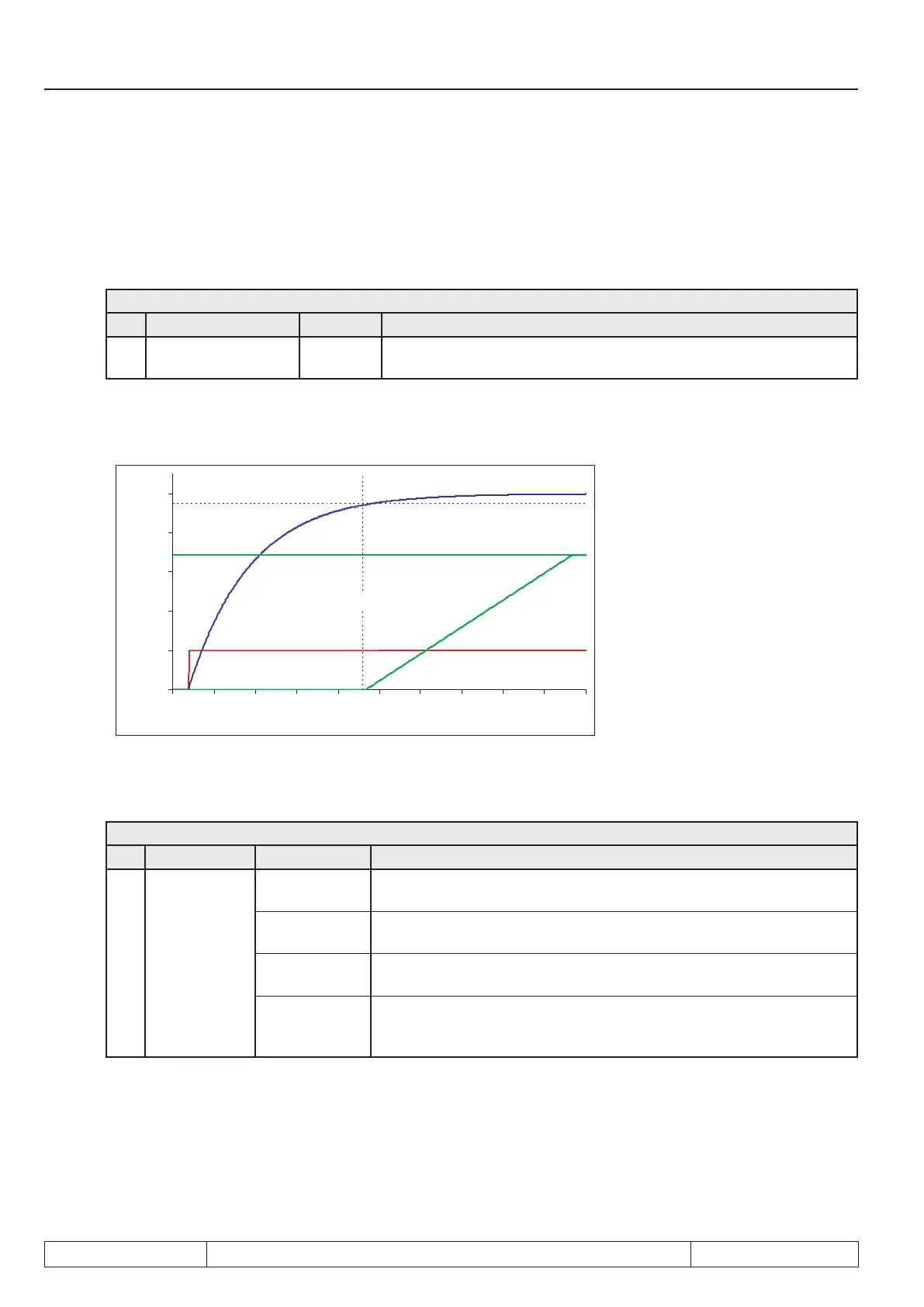
The speed setpoint (ru.01) is applied only after the ux build-up, i.e.,
only then ramps and speed controller become active
Bit 7 in dS.04 ("Wait for magnetisation (ASM)") must therefore always be set (value 128). Thus the setpoint
setting is only released if the ux is build up to 95%.
0%
20%
40%
60%
80%
100%
00,1 0,20,3 0,40,5 0,60,7 0,80,9 1
Zeit [s]
Sollwertanzeige (ru.01)
Anzeige Rampenausgang (ru.02)
Reglerfreigabe (ST)
Fluss / Nennfluss
The ux controller must be activated for the operation with motor model.
The parametrisation of the controller (KP ux / dS.11, KI ux / dS.12, limit magnetising current / dS.13) is carried
out automatically by Fr.10 and after the motor identication (dr.48).
dS.04 Flux/rotor adaption mode
Bit Meaning Value Explanation
5, 6
Flux control
(ASM)
0: off
Flux controller always off (these adjustment is not allowed for the ope-
ration with motor model)
32: on
ux controller always on (must be used for control with motor model
and encoder feedback)
64: on,
n^3/dr.17^3
ux controller active, speed-dependent limit of the controller (at speed
0 = 0 / at speeddr.17 = dS.13)
96: on,
start and
n^3/dr.17^3
as value 64, exception: start of the drive:
here, (despite speed 0) for magnetisation the limit of the ux controller
is set to the value dS.13.
During operation with speed feedback, the ux controller must be activated over the whole speed range, i.e.,
the value 32 must be chosen in dS.04 in the item "ux control".
Value 64 or 96 should be selected during operation without speed feedback.
With Fr.10, the parameter dS.13 "Limit magnetising current" is set to half the rated motor current. If the ux
build-up time is to be shortened or if particularly high demands are made on the dynamics in the eld weakening
range, this value can be changed to the rated motor current (dr.00).
The inverter can only provide the standstill current at speed 0. Error OL2 is released shortly if the current is
 Loading...
Loading...


