Page 7.12 - 12 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating
7.12.2.8 Approach to reference point / stop at index 0
By setting bit 5 (stop at index 0 = 32: on), it can be programmed that the drive after completion approach to
reference point moves automatically (i.e. without „start positioning“ signal) to the position of index 0.
PS.20 "approach to reference point ramp time" species the acceleration / deceleration values for the posi-
tioning to index 0. The maximum prole speed for positioning is determined for Index 0 by the value of PS.25
"index speed".
The drive remains at that Position. The setting "continue prole = yes” from index 0 is ignored.
PS.14 Mode of position reference
Bit Meaning Value Explanation
5 Stop at index 0
0: off After approach to reference point the drive stops at the reference point.
32: on after approach to reference point, the position from Index 0 is driven to.
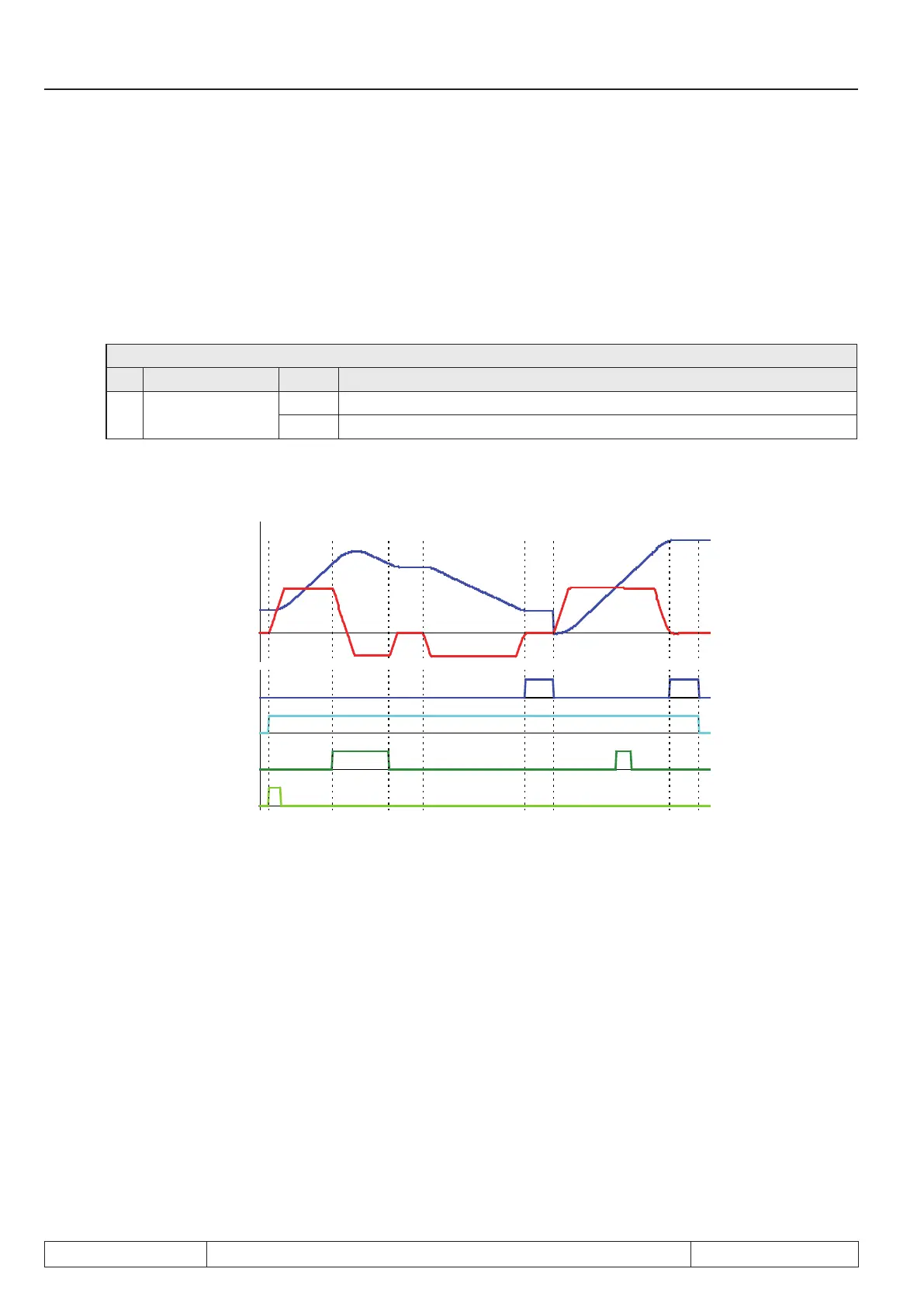
The following gure shows an approach to reference point with stop at the null signal left of the reference point
switch and automatic positioning to index 0:
1 2 3 4 5 6 7 8
ru.54: actual po-
sition
ru.02 setpoint
speed
Target window not
reached
search for ref. active
Reference switch signal
Start approach to refe-
rence point
1: Start of approach to reference point
2.: Run-on at the reference point switch
2 - 3: Reversing and free driving of the reference switch
3 - 4: Stop left of the reference switch
4: Start of the positioning to the null signal of the encoder
5 - 6: Waiting out the damping period after reaching the null signal
6: Referencing of the actual position:ru.54 is overwritten with the value of PS.17 "reference point"
6 - 7: Positioning to the target position of index 0 with the ramp time from parameter PS.20
7: Reaching of the target position
8: Approach to reference point nished
 Loading...
Loading...


