7.12.3.5.4 Synchronization with ramp
Synchronization with ramp is the most comfortable method for the initial synchronization. It is always used for
synchronization after interruption of the synchronous running due to switching off the modulation.
PS.00: Posi / synchronous mode
Bit Meaning Value Explanation
10
Synchronous running /
starting ramp (oP.28)
1024: off
Synchronization at the start of the synchronous running with
the ramp times for acceleration / deceleration, clockwise
rotation
With activation of the synchronous module, the master position (set point position ru.56) is set to the slave
position (current position ru.54).
The slave accelerates with the predened ramps, to follow the master.
Because of the different speeds of master and slave, an angle difference occurs. This missing distance to reach
the master position is made up for by increasing the slave speed beyond the master speed. The slave calcu-
lates a setpoint speed prole, which allows it to make up for the angle difference.
Maximum speed for this setpoint prole is the maximum setpoint oP.10 / oP.11. If the drive cannot follow the
setpoint speed prole, the remaining angle difference is eliminated by the position controller. Therefore, the
maximum speed during the synchronisation phase is oP.10 / oP.11 + position controller limit PS.09. This value
is still limited by the absolute maximum setpoints (oP.14 / oP.15).
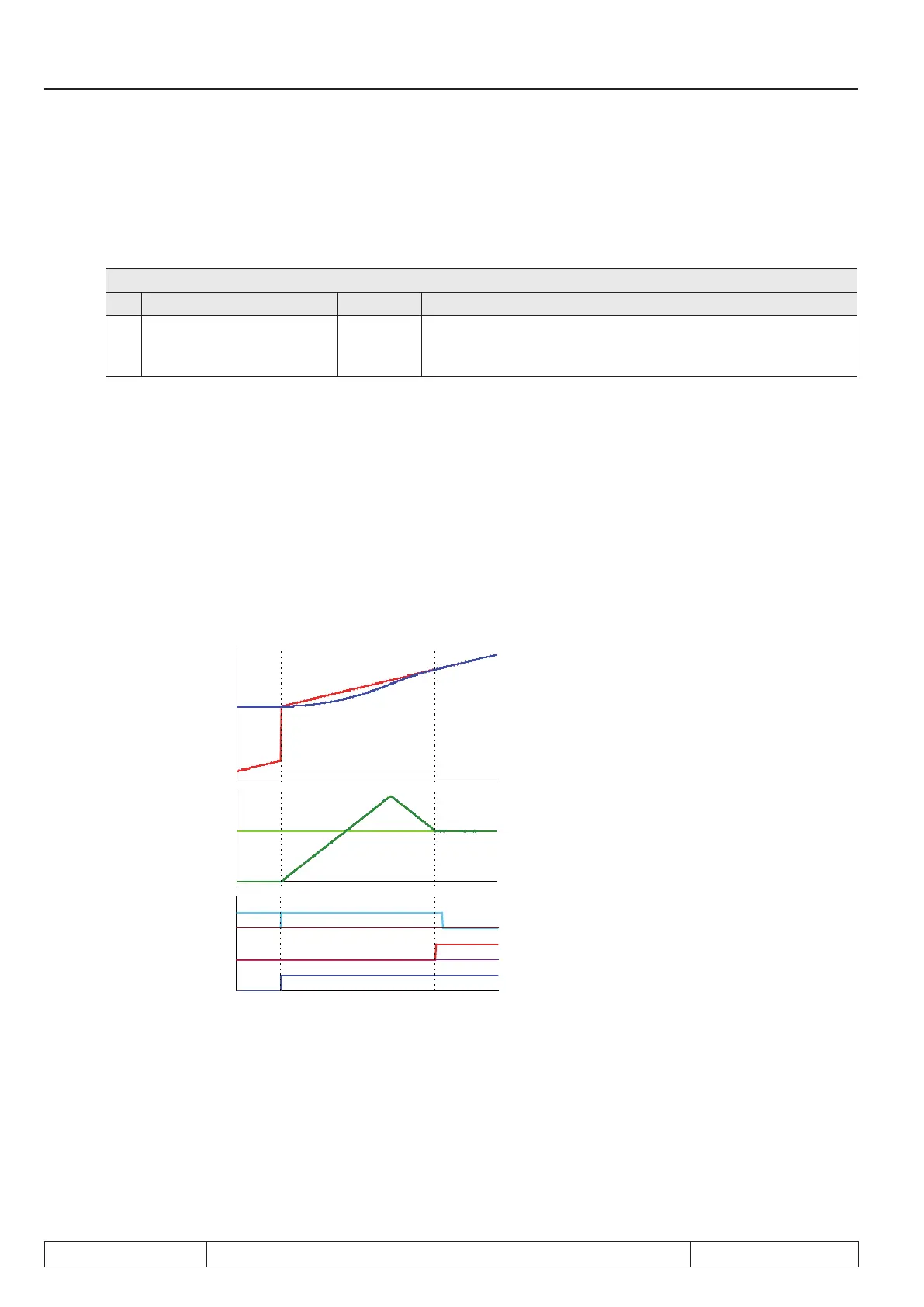
ru.56: Set position
(master position)
ru.54: actual position
(slave position)
Actual speed
master
(converted with the
gear ratio)
Actual speed slave
Angle difference >
level
Drive runs synchro-
nously
activate posi/ syn-
chronous running
time
At the start of the synchronous running, the ma-
ster position (set position ru.56) is set to the sla-
ve position (actual position ru.54).
The slave accelerates and compensates the lost
distance.
The ramps must be adjusted by such way that
the slave drive can follow without reaching the
torque limits.
The switching condition "drive running synchro-
nously" is set if the calculated setpoint speed
prole for reaching the master position is com-
pleted.
If, e.g., the torque limit is reached, angle syn-
chronicity is not given at that time.
If achievement of a specic angle accuracy has
to be checked, the switching condition "drive run-
ning synchronously" must be linked with the swit-
ching condition "angle difference < level".
As soon as the slave reaches the last phase of the synchronization(that means: the last deceleration or acceleration
to the master speed), the ramp can deviate from the programmed values. This is the case if the master speed is not
constant, i.e., if adjustments still have to be made during the running-in. Adjustments of the values for acceleration or
deceleration are not accepted anymore during this phase.
Additionally, an offset can be entered in parameter PS.05 "start offset" to run the master offset to the slave . The
master position is set to the value slave position – PS.05 upon activation of the synchronous running.
That means: ru.56 = ru.54 – PS.05 (at the time of activation)
Page 7.12 - 22 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating
 Loading...
Loading...


