Page 7.11 - 14 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Speed measurement
7.11.8 Gear factor
7.11.8.1 Denition
The gear factor (ratio drive speed tooutput speed) is dened by two parameters: gear factor numerator and
gear factor denominator
Counter
––––––––
Numerator
Gear factor =
For every encoder channel, a gear factor can be given. Ec.04 / 05 or Ec.56 / 57 denes the gear factor for
channel 1. Ec.14 / 15 or Ec.58 / 59 denes the gear factor for channel 2.
The gear factor can be preset with a higher resolution and a higher value range in the second parameter pair
(Ec.56 / 57 or Ec.58 / 59).
Parameter "gear factor counter long" (Ec.56 for channel 1 or Ec.58 for channel 2) determines the parameter
pair that denes the gear factor.
If this parameter contains a value not equal to "0:off" for the respective channel, the "long" gear factors apply.
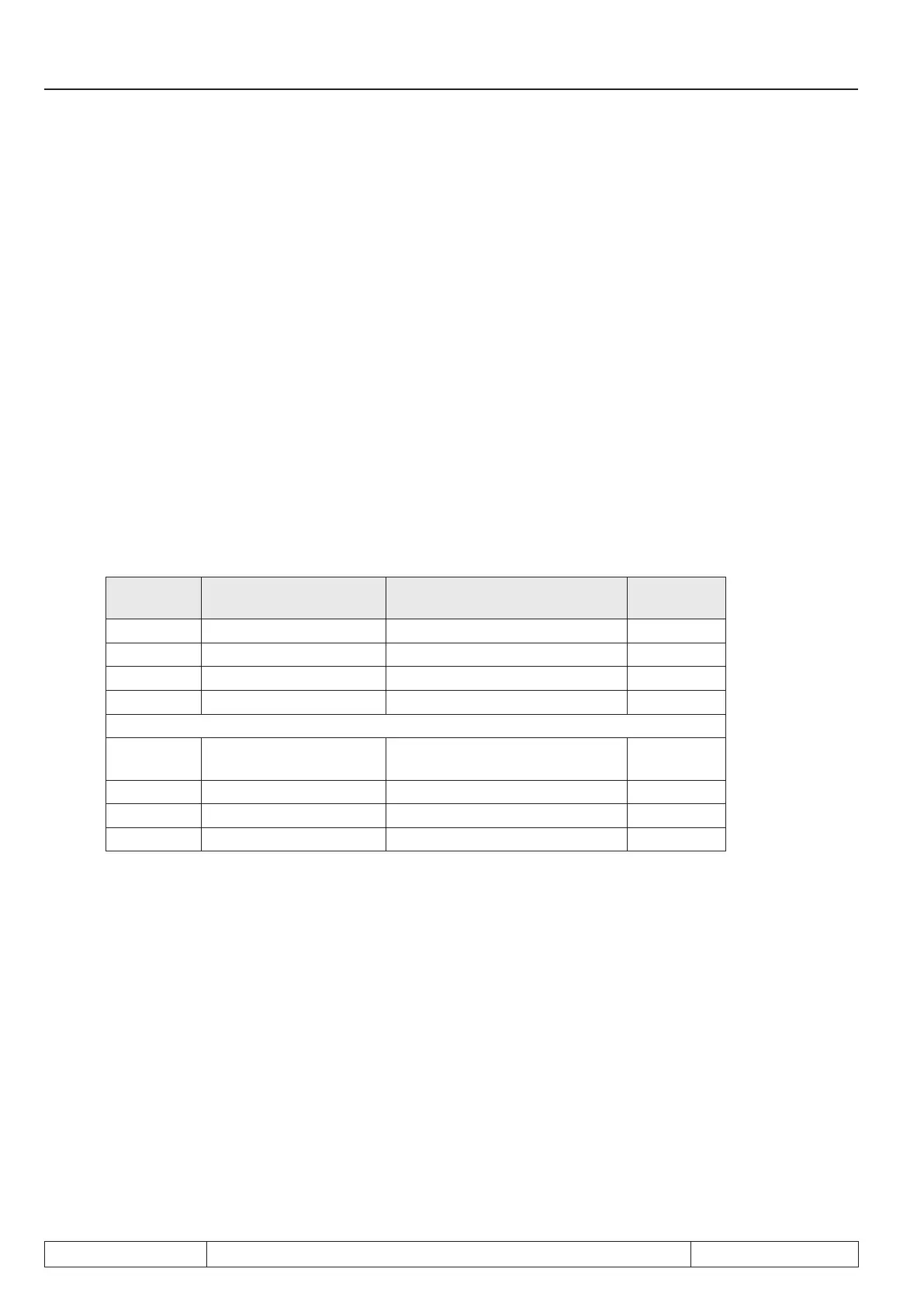
Overview of the parameters for gear factor setting:
Parameter Description
Value range
Default
value
Ec.04 gear 1 numerator -30000…30000 1000
Ec.05 gear 1 determinator 0...30000 1000
Ec.56 Gear 1 numerator long -1073741824...off...1073741823 off
Ec.57 Gear 1 denominator long 0…10741823 1000
Ec.14
Gear factor channel 2
counter
-30000…30000 1000
Ec.15 gear 2 determinator 0...30000 1000
Ec.58 Gear 2 numerator long -1073741824...off...1073741823 Off
Ec.59 Gear 2 denominator long 0…1073741823 1000
Setting a gear factor is necessary in the following applications:
• Motor encoder connection via a gear
If the speed sensor for the motor speed cannot be connected directly to the motor shaft, the gear ratio
between motor and speed sensor must be set.
• Use of a resolver with a pole-pair number greater than 1
By default, the use of resolvers with pole-pair number 1 is assumed. If other types are to be used, the
different pole-pair number is treated like a gear factor. The ratio of gear factor denominator to gear factor
numerator must be set equal to the pole-pair number. If different synchronous motor are to be used in this
set-up, it must be ascertained that the value pole-pair number x gear factor is integer (see example 1).
• Synchronous running
For synchronous control, the gear ratio between master and slave drive must be known to the inverter
(see chapter 7.12.3.3 synchronous mode / position normalisation)
• positioning
The gear factor is needed if control is not directly by motor position, but the position encoder is connected
with a gear (see chapter 7.12.4.3 position normalisation).
 Loading...
Loading...


