Posi- and synchronous operating
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.12 - 59
7
Start positioning
Activation positioning/ synchro-
nous
7.12.4.13 Posimode/yingreferencingwithcorrection
During the round table positioning with only one encoder for motor and round table position, a ying referencing
for correcting a gear factor error exists. For other applications using only one encoder, one needs compensati-
on for slip (undercarriages) or cable stretch (hoists).
An undercarriage shall, e.g., be moved 1m, corresponding to 10,000 increments. During starting, the powered
wheels slip on the steel rail, however, so that after 10,000 increments of encoder revolution, the undercarriage
has only travelled 0.95m.
To compensate for this error, the slip-aficted system can be resynchronised via reference markers. There re-
ference markers indicate the real position of the drive. An adjustment value is calculated from this information.
The adjustment is still carried out within one active positioning, to reach the target at the predened position.
To be able to approach the target from both directions, two reference markers that can be located at different
positions must be supported.
Dependent on the direction of rotation, the positive edge of the reference marker is expected at a distance
to target of PS.46 "relative adjustment switch clockwise rotation" (direction of rotation clockwise) and PS.47
"relative adjustment switch counter clockwise rotation" (direction of rotation counter clockwise), respectively.
In parameter ru.69 "distance ref.-zero point", the adjustment value is displayed. It is calculated as:
Clockwise rotation: ru.69 = PS.46 - (ru.61: target position - ru.56: set position)
Counter clockwise rotation: ru.69 = (ru.61: target position – ru.56: set position) - PS.47
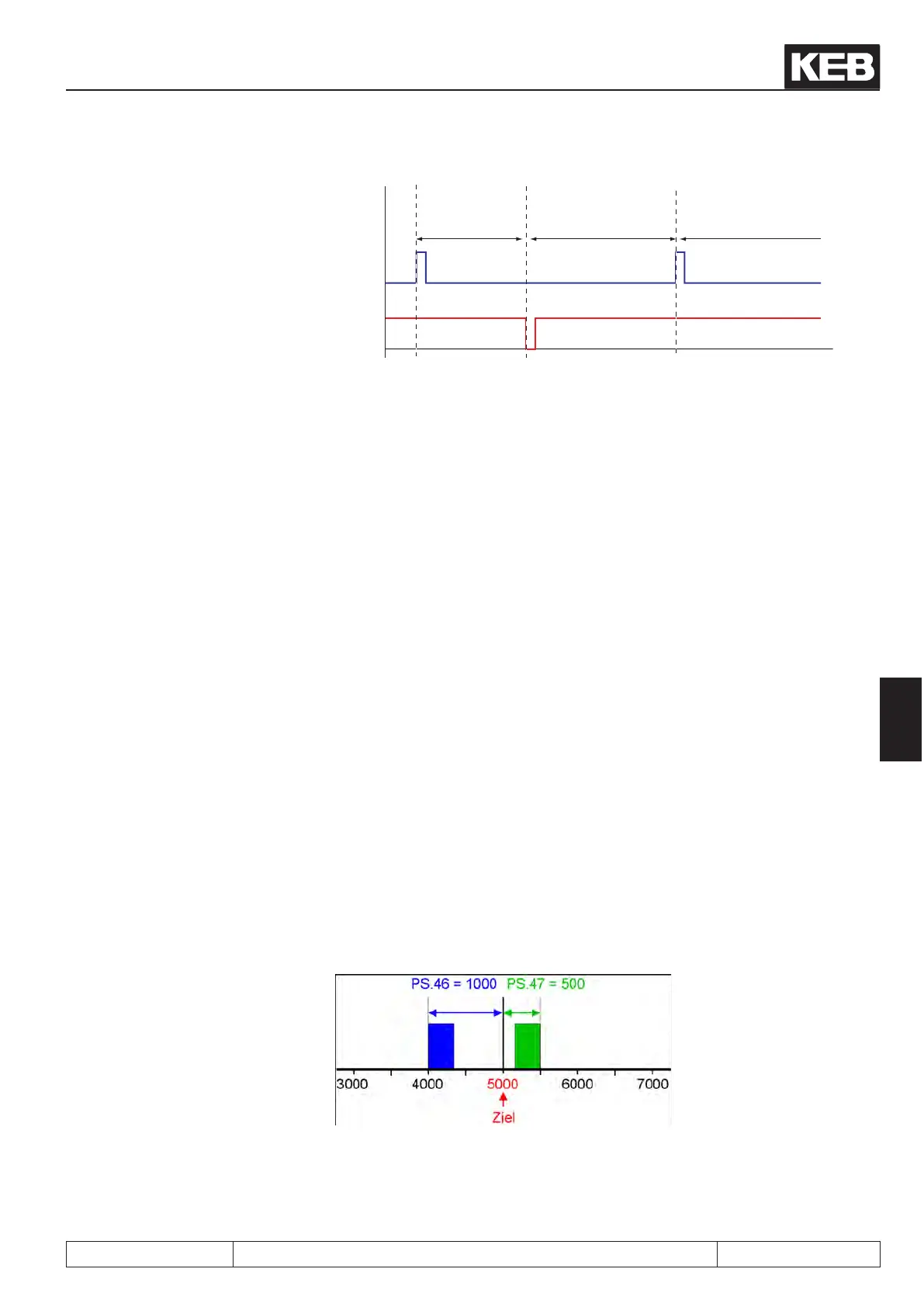
Example:
Un undercarriageshall drive to the position 5m (= 5,000 increments).
The undercarriage loses 02m (= 200 increments) during acceleration due to slip.
The right reference marker is situated at position 4...4.3m => PS.46 = 1m = 1,000.
The left reference marker is situated at position 5.2...5.5m => PS.47 = 0.5m = 500.
Clockwise rotation: Counter clockwise rotation:
 Loading...
Loading...


