Page 7.13 - 22 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Protective functions
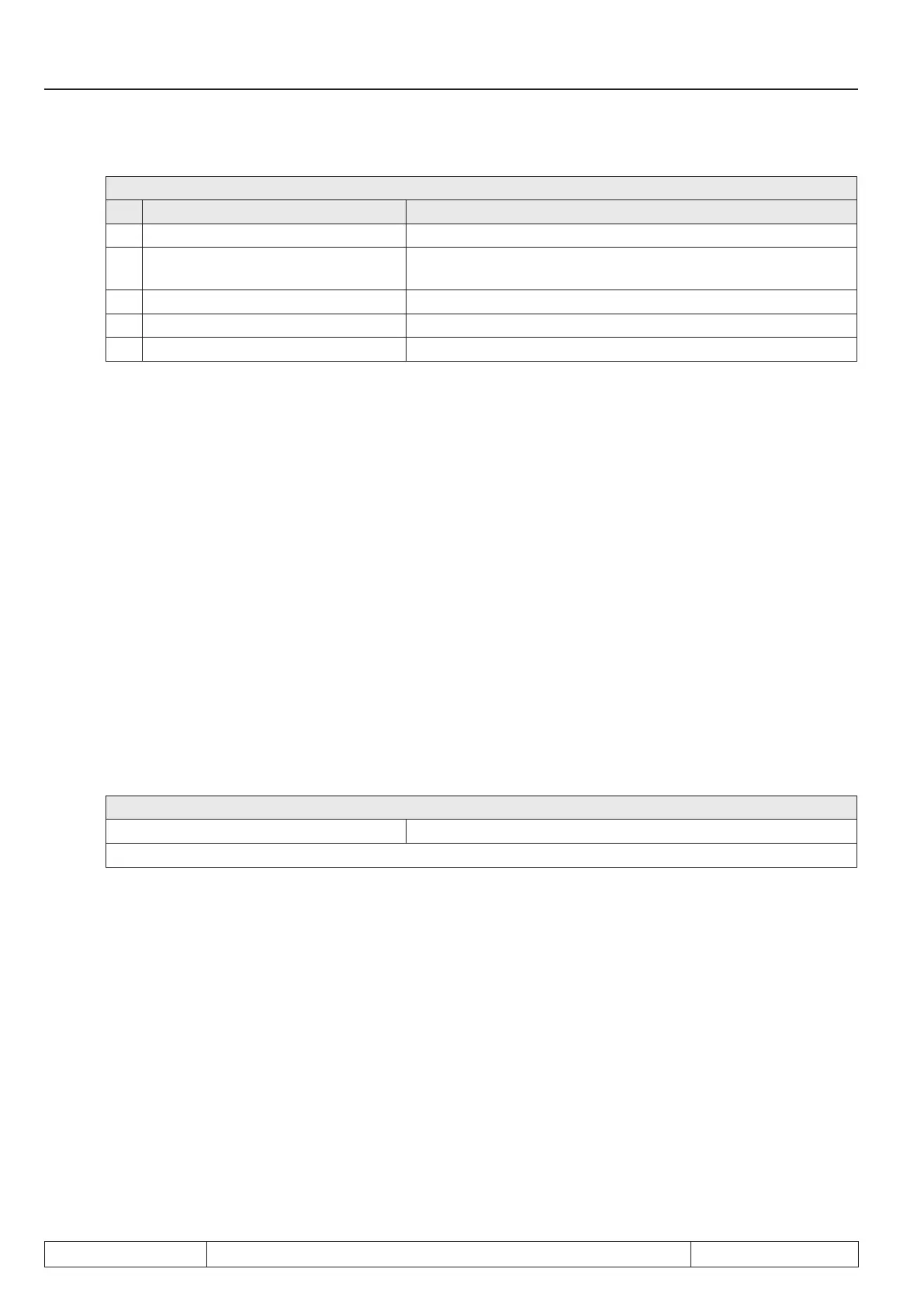
Pn.26: Speed search condition
Bit Meaning Explanation
0 1: Speed search after noP Speed search after the status "no control release"
1 2: Speed search after power-on-
reset
Speed search after power on
2 4: Speed search after reset Speed search after execution of a reset
3 8: Speed search after auto reset Speed search after automatic restart
4 16: Speed search after LS Speed search after the status "standstill (modulation off)"
7.13.6.1 Speed search in open-loop operation
The speed search mode determines the frequency and voltage jumps as well as the maximum load factor with
which the function works. Higher values let the function work faster, lower values make the function "softer".
7.13.6.2 Speed search in closed-loop operation with encoder
In closed-loop operation with activated speed search, the ramp output value is set to the current actual speed.
After the motor ux has been built up, the drive runs up to the setpoint speed.
7.13.6.3 Speed search at asynchronous motors in closed-loop operation without encoder
In closed-loop operation without encoder, the current actual speed must be estimated from the motor model.
For special motors (e.g., high frequency spindles) or applications (e.g., operation in very high eld weakening
range), this estimate for the engagement onto a running motor may not work. The speed is then calculated
incorrectly and the drive vibrates or the inverter raises a malfunction.
In these cases, the motor must be stopped by DC braking (see chapter 7.15.) before the drive can be restarted.
Generally, however, the speed search is the most jerk-free and quickest path to switch to a running motor.
Pn.90: Speed search lower limit (ASCL)
Value range: 0.0 - 20.0 % Default value : 2.0 %*
not set-programmable
* referring to the rated speed of the motor
If the determined speed after speed search is below the limit in pn.90, speed = 0 rpm is preset.
Advantage: The drive is not in "delay" state, thus the motor model remains always active from the start.
7.13.7 Ramp stop
The ramp stop function essentially fulls two tasks. It reduces the risk of:
- Overcurrent errors (E.OC) during the acceleration or deceleration phase (only for v/f-characteristic
operation)
- Overvoltage error (E.OP) during the deceleration phase (in all operating modes)
By stopping the ramp if Pn.24 "ramp stop current level" or Pn.25 ramp stop DC-link voltage level" is exceeded.
Moreover, the ramp stop function can be activated by a digital input.
Pn.22 selects which of the ramps (acceleration, deceleration or both ramps) can be stopped.
 Loading...
Loading...


