7.12.4.15 Posi mode / inaccessible positions
An "inaccessible position" is a target position that cannot be reached with the programmed acceleration / de-
celeration and jerk times.
This can occur in the following circumstances:
● Transition from vector controlled to position controlled operation due to the first "start positioning" after
activation of the positioning mode
● Change of the target position during a running positioning by a new "start positioning" signal
● during sequential positioning, when no stop is scheduled at the target
● due to a change in the actual and set point positions by flying referencing with adjustment
● if the drive is running at the time of the "start positioning" command and a rotation change is required for
the positioning
I.e., every time the drive is running at the time of the "start positioning" command, inaccessible positions can
occur.
Also, if a new "start positioning" pulse is given during the deceleration phase to the original target, and the S-
curves are switched off, the message "inaccessible position" is generated because an adjustment during the
final approach to target is only executed during the lower S-curve.
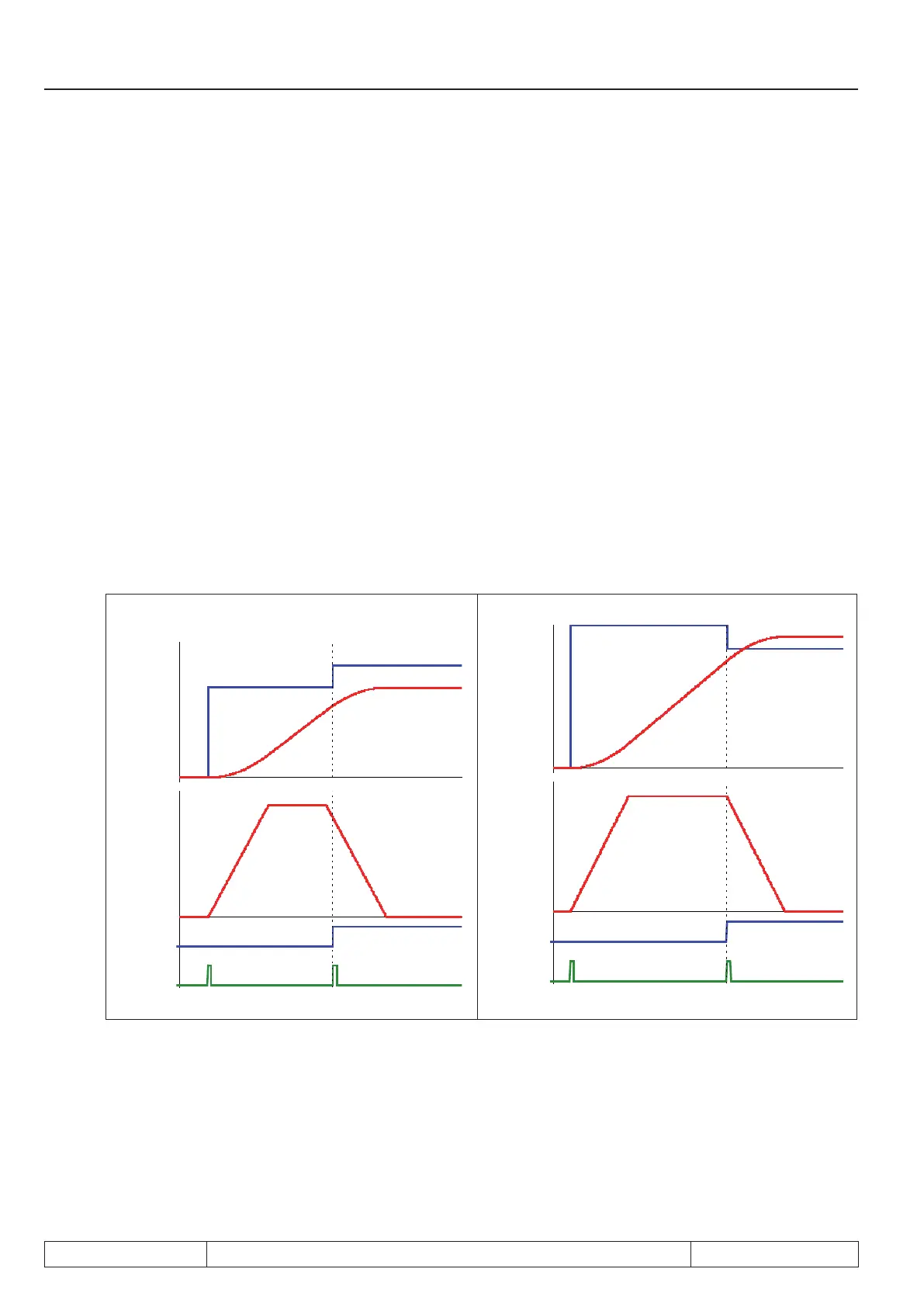
ru.02: ramp output display
Target not reachable
Start positioning
ru.61: target position
ru.56: Set position
Position not reachable, because new start
positioning during deceleration ramp
ru.02:ramp output display
Target not reachable
Start positioning
ru.61: target position
ru.56: Set position
Position not reachable, because new target is too close
Page 7.12 - 68 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating
 Loading...
Loading...


