7.12.3.8 Angular reset
An input can be dened via the parameter "reset master/slave difference input selection" (ps.11) that sets the
current angle difference between master and slave to zero.
At the rising edge of the input, the master position (= ru.56 "set point position") is set equal to the slave position
(= ru.54 "actual position"). Resetting the angle adjustment is done without ramps. Switching condition "drive
running synchronously" remains set.
START
STOP
FUNC.
SPEED
ENTER
F/R
ANTRIEBSTECHNI K
START
STOP
FUNC.
SPEED
ENTER
F/R
ANTRIEBSTECHNI K
X3B X3A X3B X3A
3
~
3
~
Load
i= 5,25
Load
i= 15
speed
closed-loop
master drive
speed
closed-loop
slave drive
forward direc-
tion of rotation
reverse direc-
tion of rotation
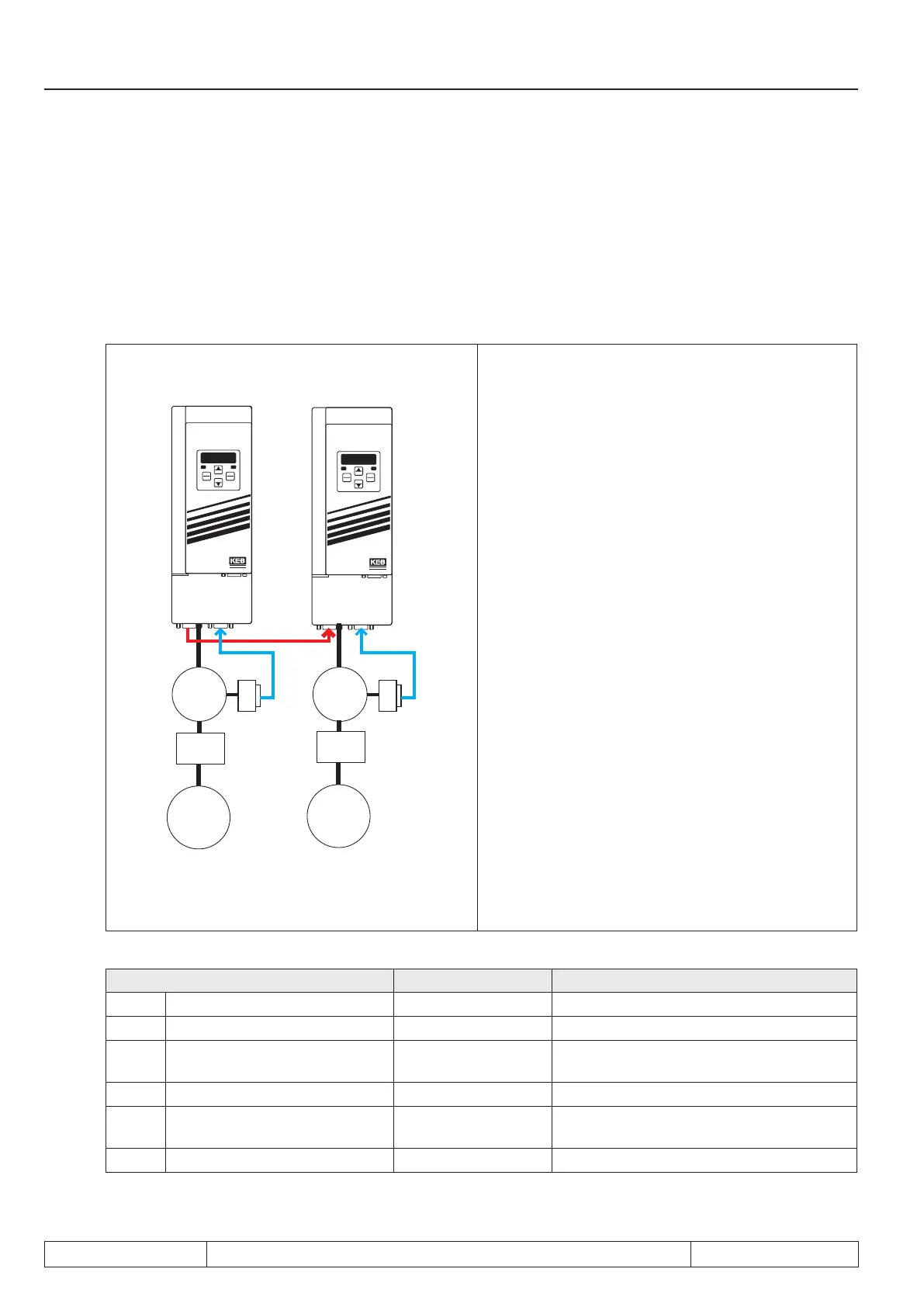
Example of a printing press:
An F5-S serves as master shaft.
X3B of the master is incremental encoder output.
The incremental encoder analogue provides 2048
increments per revolution.
The master transmission has a gear ratio of 15 to 1.
An F5-S serves as slave.
X3B of the slave is incremental encoder input.
The slave transmission has a gear ratio of 5 to 1.
Parameter list for the slave shaft:
Parameter Value Notice
cS.00 Controller conguration 4: vector controlled
cS.01 actual source 0: Channel 1 Speed feedback is channel 1
PS.00 Posi-/synchronous mode
1: Synchronous
mode
PS.01 Actual position source 1: Channel 2 Master position via channel 2
PS.02 Posi / synch input selection 1: ST (X2A.16)
Synchronous running active, as soon as
control release is given
PS.06 KP pos/syn 100 Kp unequal 0 => angular-synchronous
Page 7.12 - 26 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating
 Loading...
Loading...


