7.12.4.4.3 Speed and position control by motor encoder/ encoder mounting after gear
Mounting of the encoder for the speed control via a gear box is not ideal, since the tolerance of the gearbox and
the ratio of gear 1 affect the control quality and dynamics of the speed controller
(and thus also the superimposed position control).
Two reasons can make this set-up necessary:
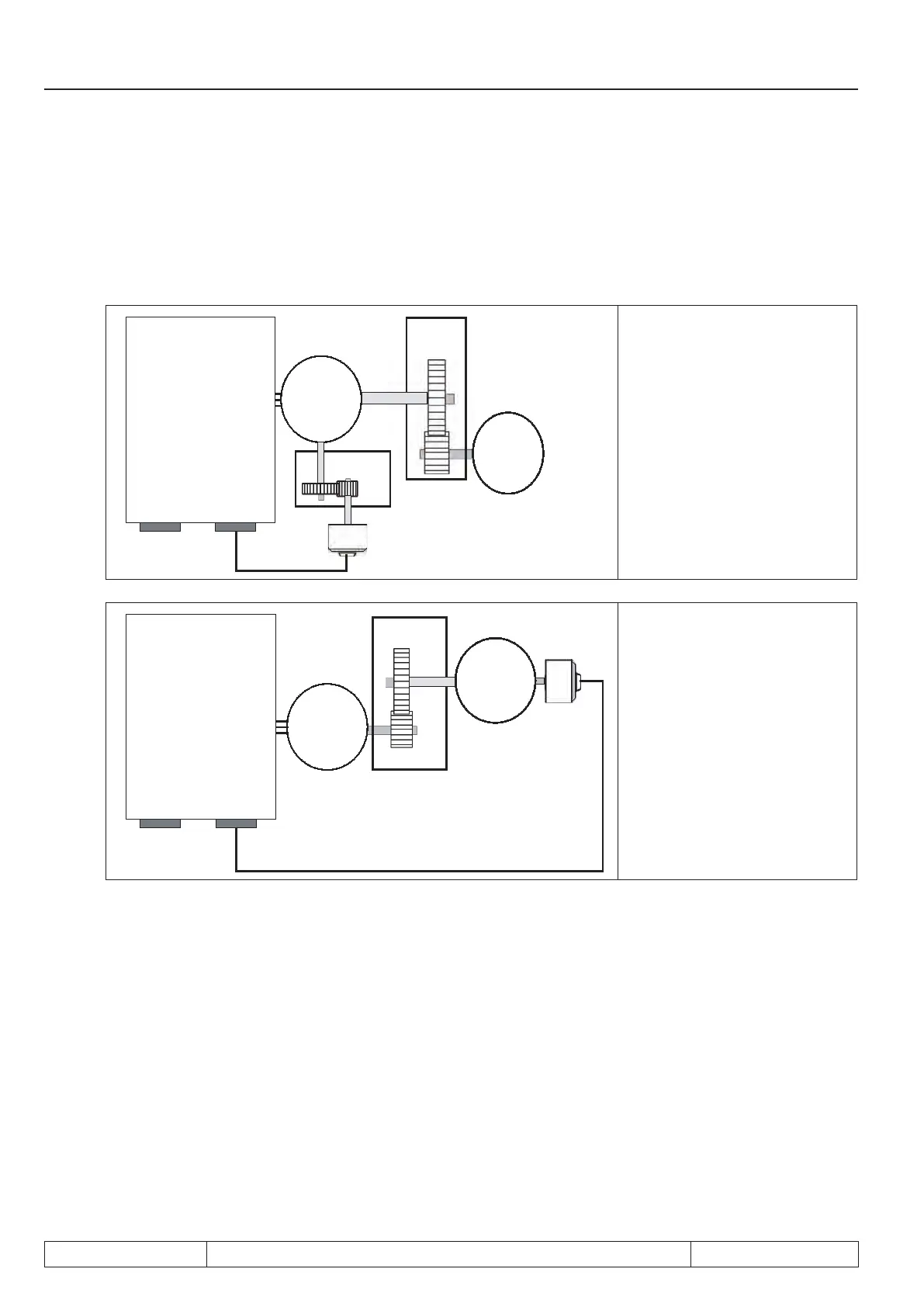
KEB COMBIVERT
F5A-S
or
F5A-S
X3B
Encoder
channel 2
X3A
Encoder
channel 1
M
3~
Motor
encoder
Last
Gear
2
Gear
1
Application 1:
Directly mounting the encoder
to the motor is not possible for
mechanical reasons.
Referencing the load position is
not possible.
KEB COMBIVERT
F5A-S
or
F5A-S
X3B
Encoder
channel 2
X3A
Encoder
channel 1
M
3~
Output
encoder
Last
Gear
Application 2:
One wants to run with only one
encoder which must be installed
behind the gear for reasons of
positioning accuracy.
If synchronous motors are to be operated in this set-up, it must be ensured that the gear ratio is < 1 and the
value of pole-pair number x gear factor is integer.
Example:
3 encoder revolutions correspond to one motor revolution
Pole-pair number = 15
→ Gear factor = 1/3 = 0.333
15
———
3
→ pole-pair number x gear factor = 5 = whole-
numbered
→ Synchronous motor operated
Page 7.12 - 32 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating
 Loading...
Loading...


