Speed measurement
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.11 - 25
7
For this the supervisor password must be entered and Ec.38 = „2: memory activated“ must be written.
If an error occurs during storage, Ec.37 displays the status „68: no communication to the encoder“. In case of
successful storage, bit „storage activated“ is automatically reset.
The system and application data are always stored!
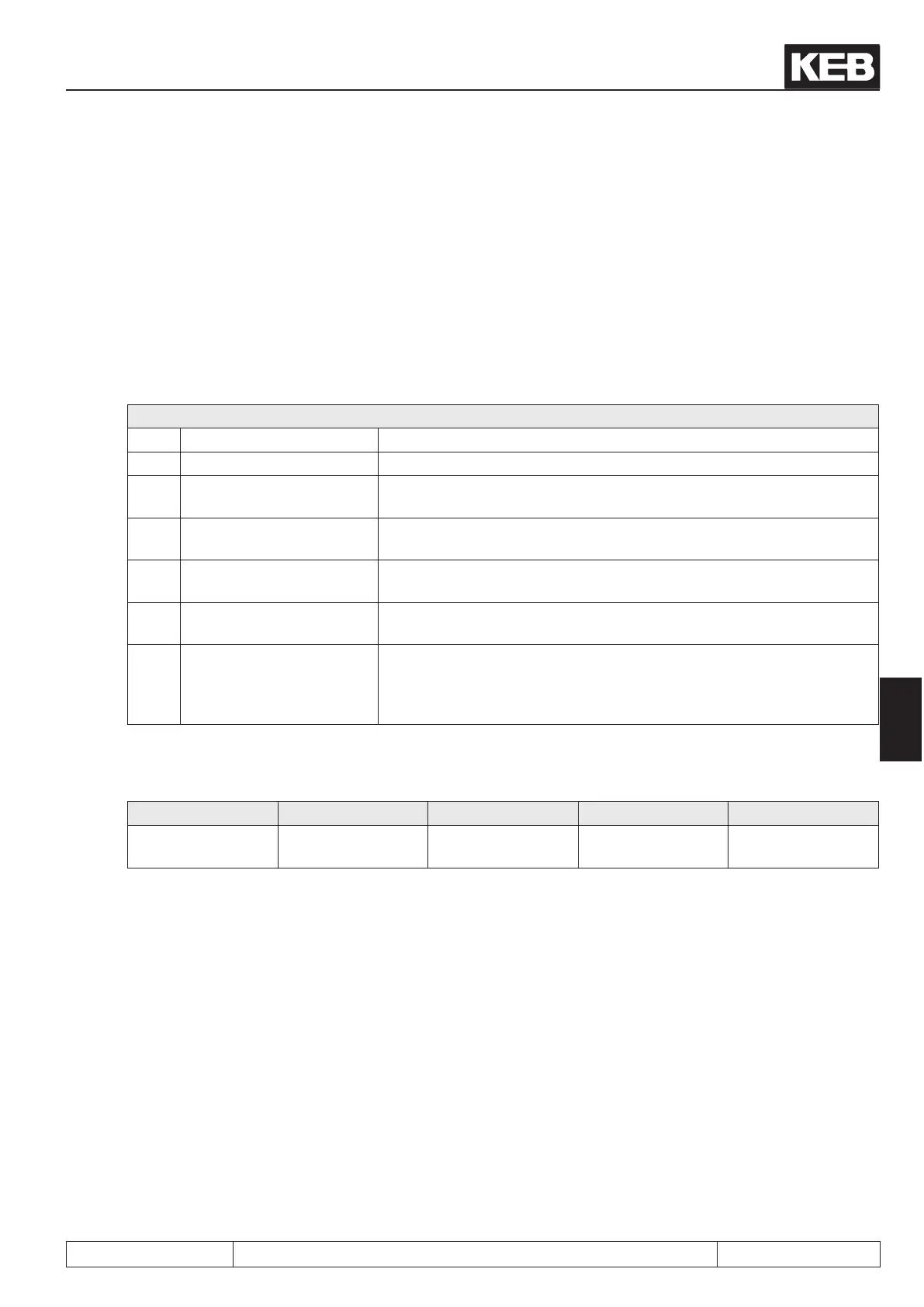
7.11.11.6 Encoder over gear (ec.39)
This parameter allows the operation of encoders that either are not mounted directly to the motor (output, belt),
whose detection have a superior position evaluation (e.g., pole-pair resolver) or whose increments per revolu-
tion cannot be set in ec.01.
Ec.39: encoder over transmission
Value Function Description
0 off No function
1 Motor – Encoder
Speed ratio in the encoder detection. Position values are evaluated
1:1, gear factor ec.04/05 enters the speed measurement.
2
Ec.01 x Ec.05 (1 zero
pulse /revolution)
The increments per revolution of the encoder is greater than the para-
meter in ec.01 allows. The zero signal is once per revolution
3
Ec.01 x Ec.05 (spacer-
coded)
like 2, but the zero signal is spacer-coded (500inc / 500 inc = zero
position)
4 reserved
Special software (like 2, but the zero signal is validated via an external
reference switch).
5
Motor – Encoder + syn-
chronous channel 2
For channel 1 as 1. The motor is operated under control of an encoder
coupled to the output. Via channel 2, control occurs position-synchro-
nous. The gear factor in channel 1 is cosidered in the speed detection
of channel 2.
7.11.11.7 Consider deceleration times of the position sensing
Addr. Parameter Name Default value Value
1126h dS.38 encoder delay 0: Off 0 = off
1 = on
As standard the delay time for resolver and incremental encoder detection is set to "0 off" in order not to affect
existing applications. Parameter dS.38 must be set to "1 on" to activate the encoder delay.
 Loading...
Loading...


