7.12.4.23 Functions and displays for the positioning mode
This chapter provides a compressed summary of the possibililties for control and visualisation of the positioning
mode. Some of the parameters and functions are described in more detail in the corresponding chapters.
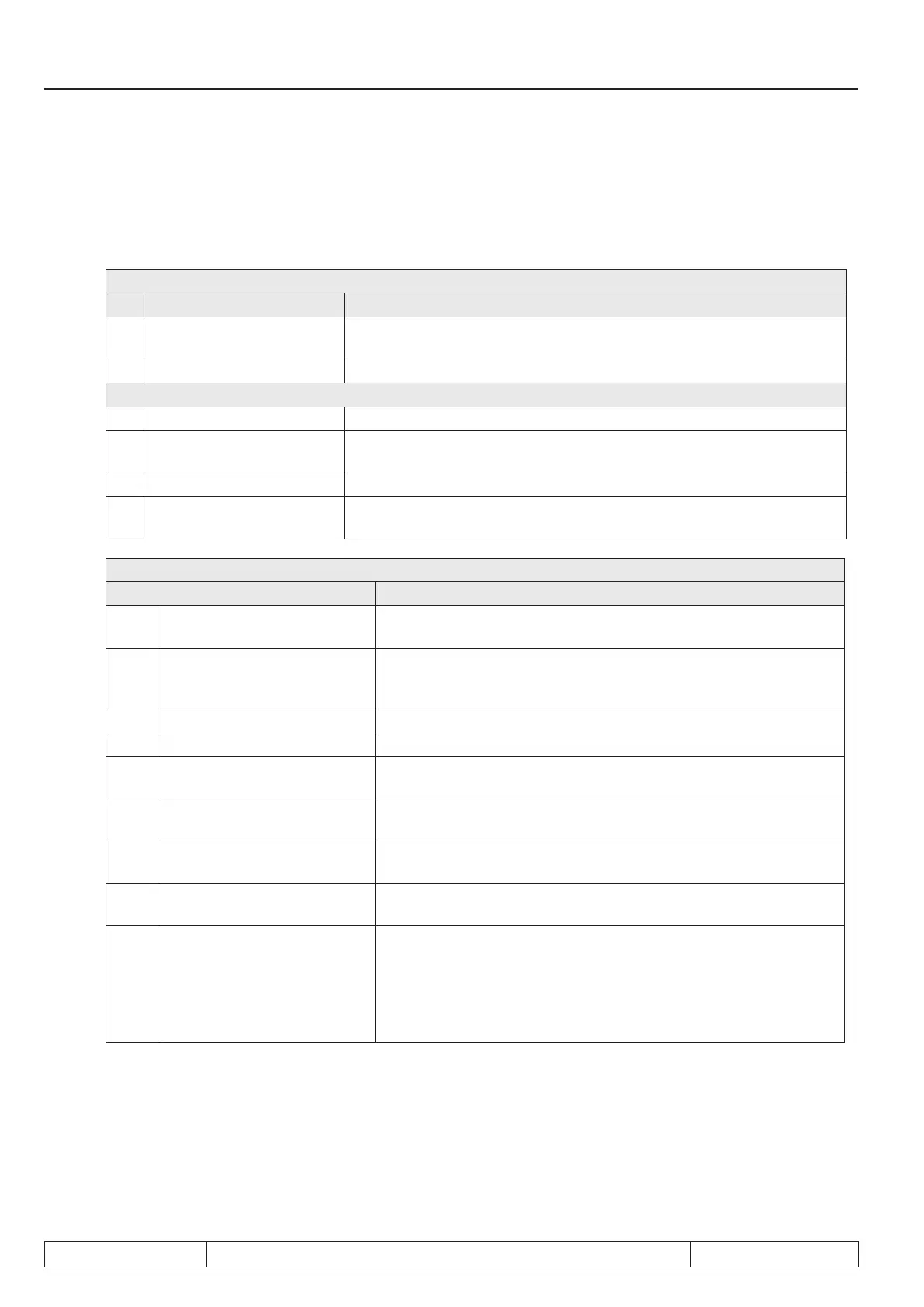
Input functions (di.11...di.22)
No. Name Function
24 Activation positioning/
synchronous
Activation of the positioning mode
29 Start positioning Start of the positioning
Input "+" functions (di.24...di.35)
2 Store position (teach) Positive edge stores an actual position as target position in PS.24
3 Scan position
Positive edge stores the actual position in parameter ru.71. Can be used
for visualisation and generation of digital output signals.
4 Relative position F/R Rotation setting for relative positioning (if selected in PS.27)
7 Reference point correction
For connecting an adjustment sensor for ying referencing with adjust-
ment.
Display parameters
Parameter Function
ru.54 actual position
Display of the actual position (calculated from the position informa-
tion of the encoder interface, selected in PS.01).
ru.56 Set position
The position that the drive is supposed to have reached currently,
according to the calculated prole (in contrast to ru.61 "target posi-
tion", to be reached at the end of the positioning).
ru.58 Angle difference Difference between set and actual position.
ru.60 Act. position index Number of the positioning block currently being processed.
ru.61 target position
The target which the drive should reach at the end of the positio-
ning.
ru.63 prole speed
Maximum value of the speed prole the inverter calculates for opti-
mal target approach.
ru.69 Distance ref.-zeropoint
The value by which the actual position is adjusted during the "ying
referencing with adjustment".
ru.71 Teach / scan position
Position value scanned by a digital input (used for digital output and
teaching).
ru.84 accessible rel. position
If the drive rotates at the time of the "start positioning" command
(vector controlled operation or new pulse during a running positio-
ning), this parameter shows what distance to the actual position
the target must be to be reachable with the programmed ramp and
S-curve times. The ramp adjustment (PS.32) is not considered (see
chapter 7.12.4.13 "Start positioning").
Page 7.12 - 74 COMBIVERT F5-A, -E, -H © KEB, 2012-10
Posi- and synchronous operating
 Loading...
Loading...


