Motor data and controller adjustments of the synchronous motor
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.6 - 17
7
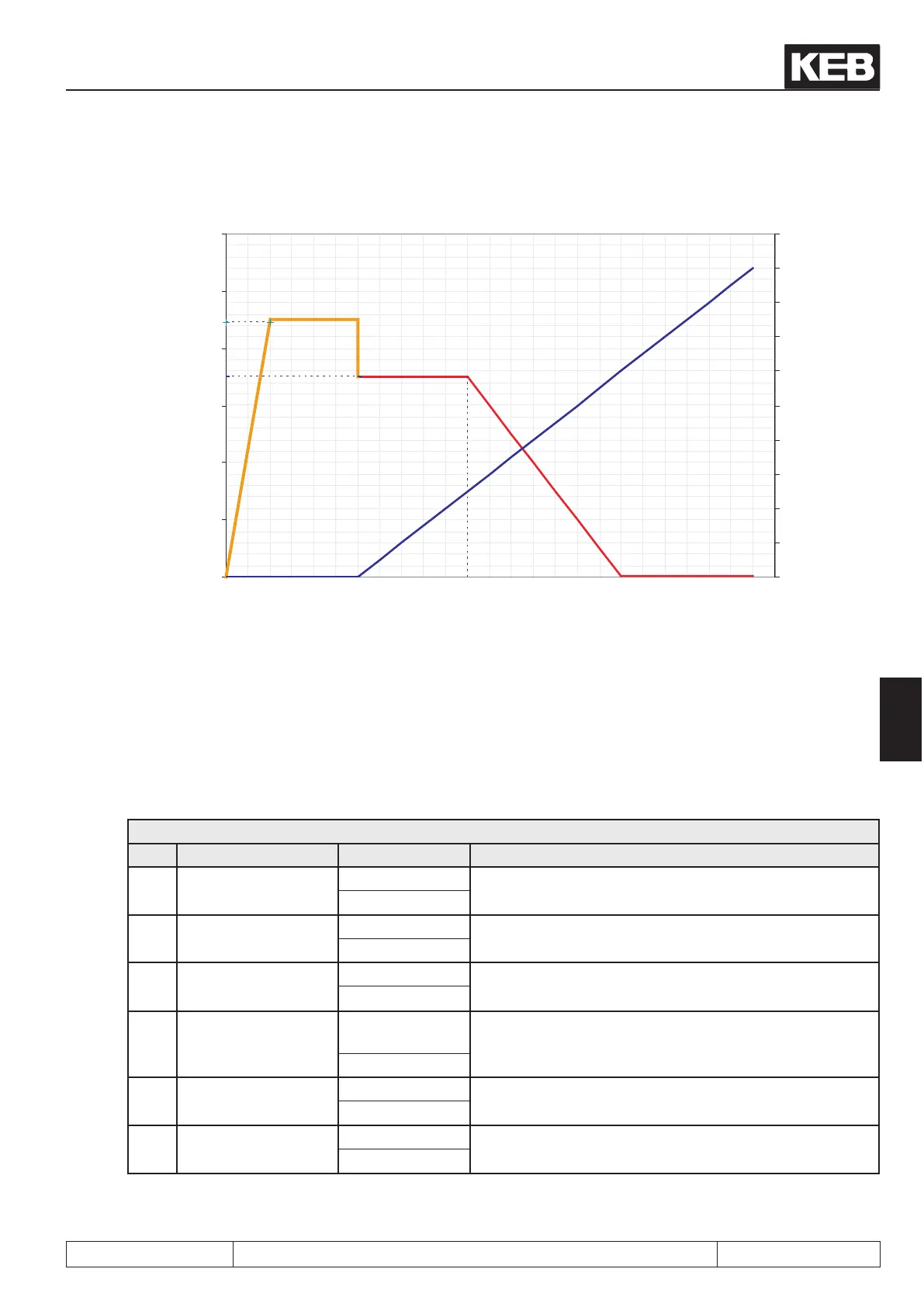
Picture 7.6.3.5a
0
2
4
6
8
10
12
Strom / A
0
20
40
60
80
100
120
140
160
180
200
Drehzahl / min-1
Stabilisierungsstrom
Rampenausgang
ru.02
nn.02 nn.03
nn.10
nn.01
Ausrichtstrom
It is necessary to adapt the current or the ramp if there are vibrations during steady state.
7.6.3.6 Motor model
The motor model calculates an estimated speed from the motor data and the actual values of voltage and cur-
rent. Then this speed is admitted to the speed controller. The calculated model currents can be used also for
current control.
nn.00 Motor model select
Bit Description Value Function
0
Standstill current and
stabilisation current
0: off
Activation of nn.01 and nn.10
1: On *
1 Model stabilisation
0: off
Stabilizes the motor model
2: On *
2
Stator resistance/
adaption
0: off
Adapts the stator resistance at low speed
4: On *
3 Speed source
0: Encoder inter-
face 1
Speed control with model to encoder 1
Speed control with spreed estimation
8: Model *
4 High-speed model
0: off
Activates the high-speed model for upper speed
16: On *
5
Observer/ motor
model
0: off
Stabilizes the high-speed model
32: On *
 Loading...
Loading...


