Roughly search within
the search region for
candidate points.
around each candidate
point.
Perform detailed
searches in the areas
A-5-3
Edge Detection Measurement
This method extracts parts with color changes as edges to perform measurement.
Edges are found through color changes in the measurement region.
When calculating the X coordinate of this edge
Measurement
region
Edge Detection Method
The following two types of edge detection method are available.
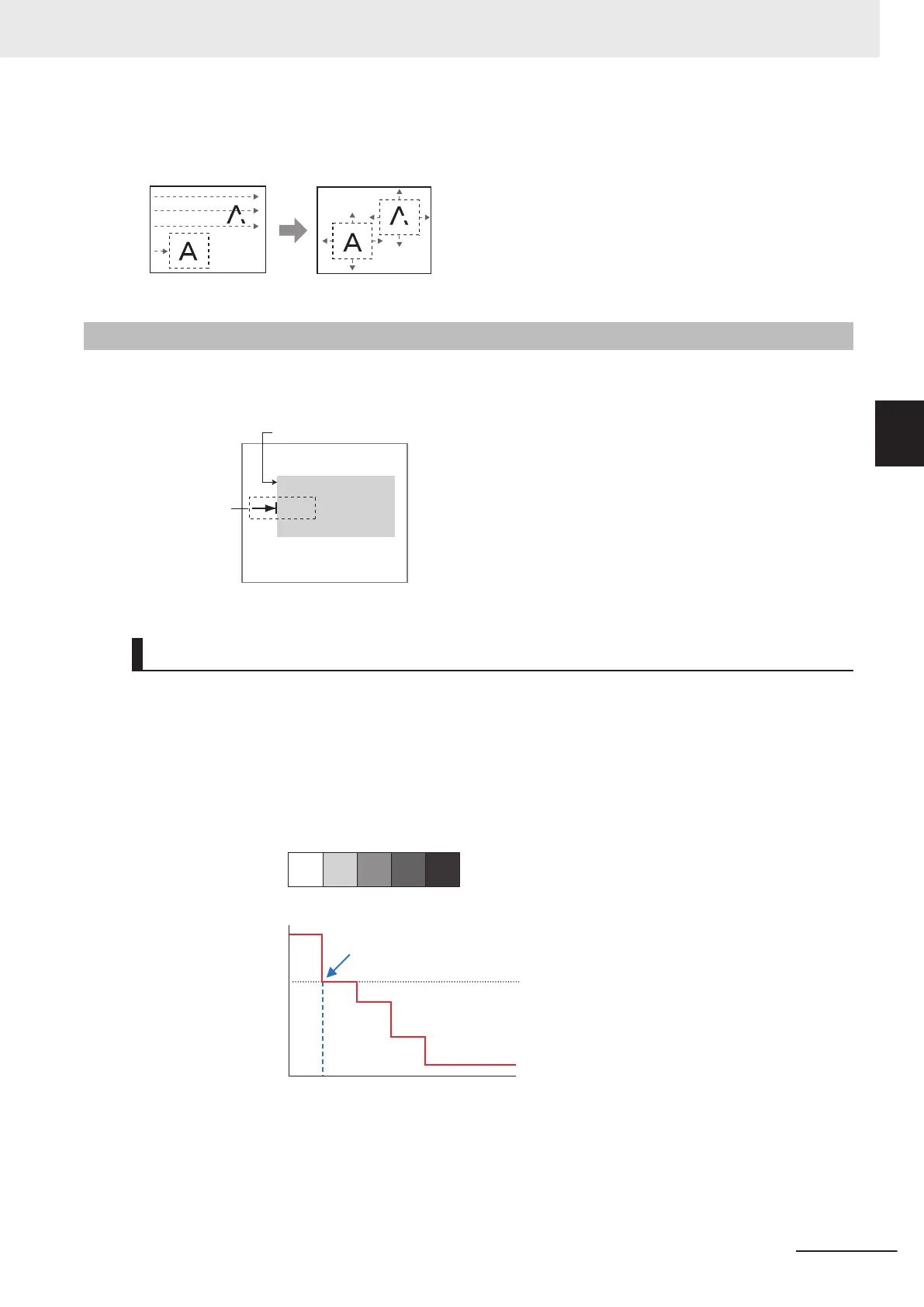
• Projection (Density method)
A projected waveform is formed relative to the density level. The intersection of the density and the
threshold (edge level) is detected as an edge.
With an image with high noise level or image with blurry edges, the density method is suitable as it
allows you to specify the density and color of the edges to be detected.
Edge level
Detection as an edge
255 170 133 70 20
0
255
Detection as an edge
(Density level)
Density
• Differential
A differential processing is performed to calculate the change in density between neighboring pixels.
A differential waveform with the largest density set as 100% of the region is created, and the maxi-
mum value (peak point) of the differential waveform that exceeds the threshold (edge level) is de-
tected as an edge.
Appendices
A - 15
FH/FHV Series Vision System User’s Manual (Z365-E1)
A-5 Measurement Mechanism
A
A-5-3 Edge Detection Measurement

 Loading...
Loading...














