Parker EME
Setting up Compax3
192-120114 N5 C3I22T11 June 2008 137
Signal ”position reached” monitors synchronicity.
Signal ”position reached” is set if
RegSearch was terminated without a reg being found
or
Reg was found and RegMove executed.
Signal ”position reached” turns into ”velocity reached”.
Signal ”position reached” shows that the drive is at a standstill.
4.1.9.3 Following error limit
The error reaction upon a following error can be set:
Possible settings for the error reaction are:
No response
downramp / stop
Downramp / switch to currentless (standard setting)
The following error is a dynamic error.
The dynamic difference between the setpoint position and the actual position du-
ring a positioning is called the following error. Do not confuse this with the static
difference which is always 0; the target position is always reached exactly.
The change of position over time can be specified exactly using the parameters
jerk, acceleration and speed. The integrated Setpoint value generator calculates
the course of the target position. Because of the delay in the feedback loop, the
actual position does not follow the setpoint position exactly. This difference is refer-
red to as the following error.
In joint operation of several servo controllers (e.g. master controller and slave con-
troller), following errors lead to problems due to the dynamic position differences,
and a large following error can lead to positioning overshoot.
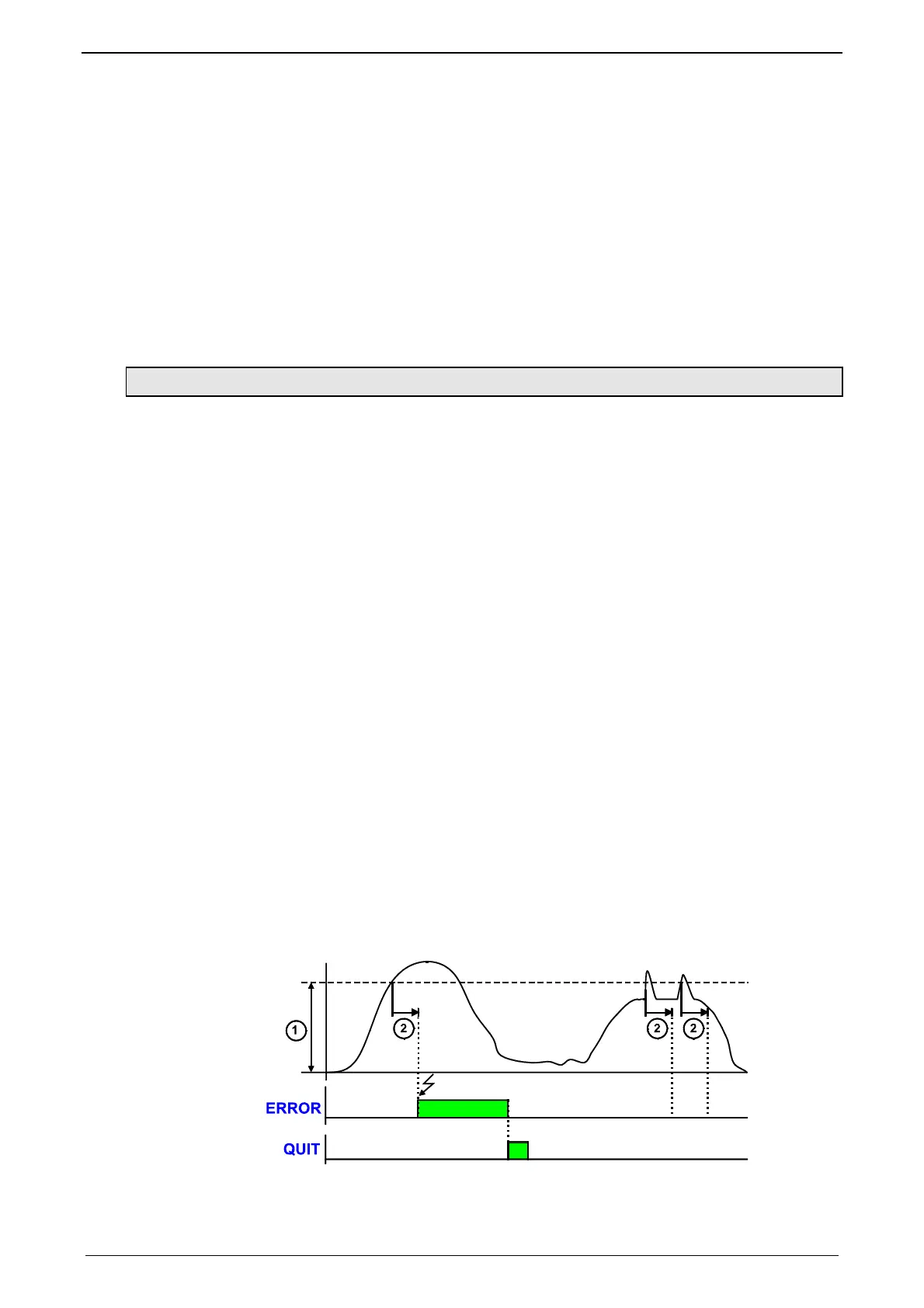
If the following error exceeds the specified following error limit, the ”following error
time” then expires. If the following error is even greater than the following error limit
at the end of the following error time, an error is reported.
If the following error falls short of the following error limit, a new following error time
is then started.
The following error can be minimized with the help of the extended (advanced)
control parameters, in particular with the feed forward parameters.
Position reached
with: Gearing
RegSearch / Reg-
Move
Velocity
STOP
Disadvantages cau-
sed by a following
error
Error message
Minimizing the fol-
lowing error
 Loading...
Loading...











