Setting up Compax3 C3I22T11
202 192-120114 N5 C3I22T11 June 2008
sponds to the bandwidth of the current loop) describes the velocity of the velocity
loop (see below).
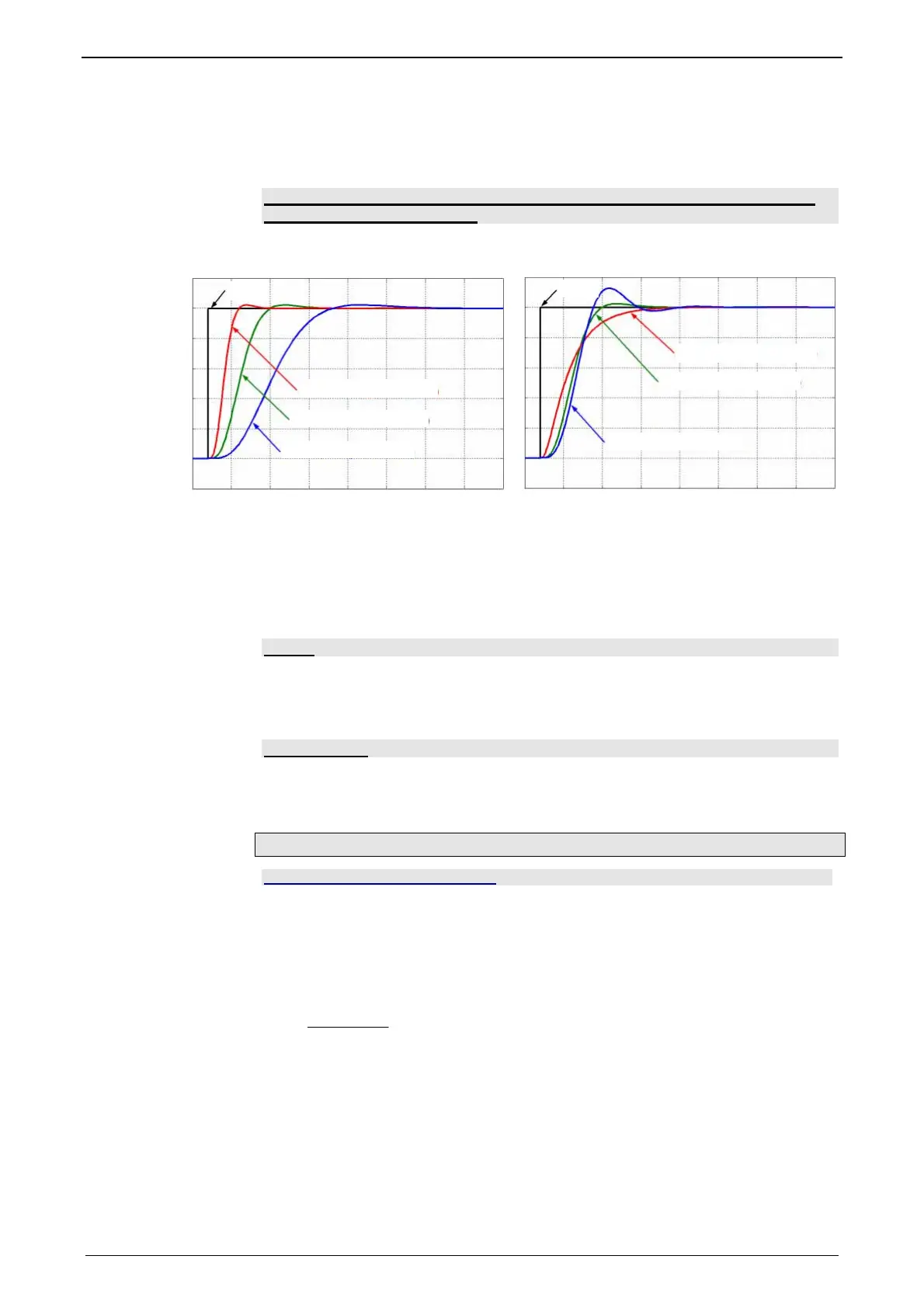
Jerk response of the velocity loop depending on the optimization paramter
"attenuation" and "stiffness"
Attenuation = 100% Stiffness = 100%
2
3
4
1
5
6
7
1
1: Setpoint value
2: Actual value (stiffness = 200%)
3: Actual value (stiffness = 100%)
4: Actual value (stiffness = 50%)
5: Actual value (attenuation = 500%)
6: Actual value (attenuation = 100%)
7: Actual value (attenuation = 50%)
D-term
The D-term parameter ( of the velocity loop) activates existing control oscillations of
drives with elastic coupling (e.g. toothed belt drives). The D-term is not automati-
cally designed and must therefore be set manually.
Postition loop
The position controller is automatically adapted depending on the stiffness of the
velocity loop.
Controller coefficients
In this chapter you can read about:
Velocity Loop ”P” Term .................................................................................................... 203
D-term of the KD velocity controller ................................................................................. 203
P-term KV position loop ................................................................................................... 203
Dependance of the controller coefficients from th optimization objects
The controller coefficients are influenced by the optimization objects such as "stiff-
ness" and/or "attenuation". The dependency is displayed below.
I-term KI in the velocity loop
StK
T
St
K
I
EGD
I
~
100
[%]
⇒
⋅
=
T
EGD
: the replacement time constant of the closed velocity loop.
St Stiffness
 Loading...
Loading...











