Setting up Compax3 C3I22T11
214 192-120114 N5 C3I22T11 June 2008
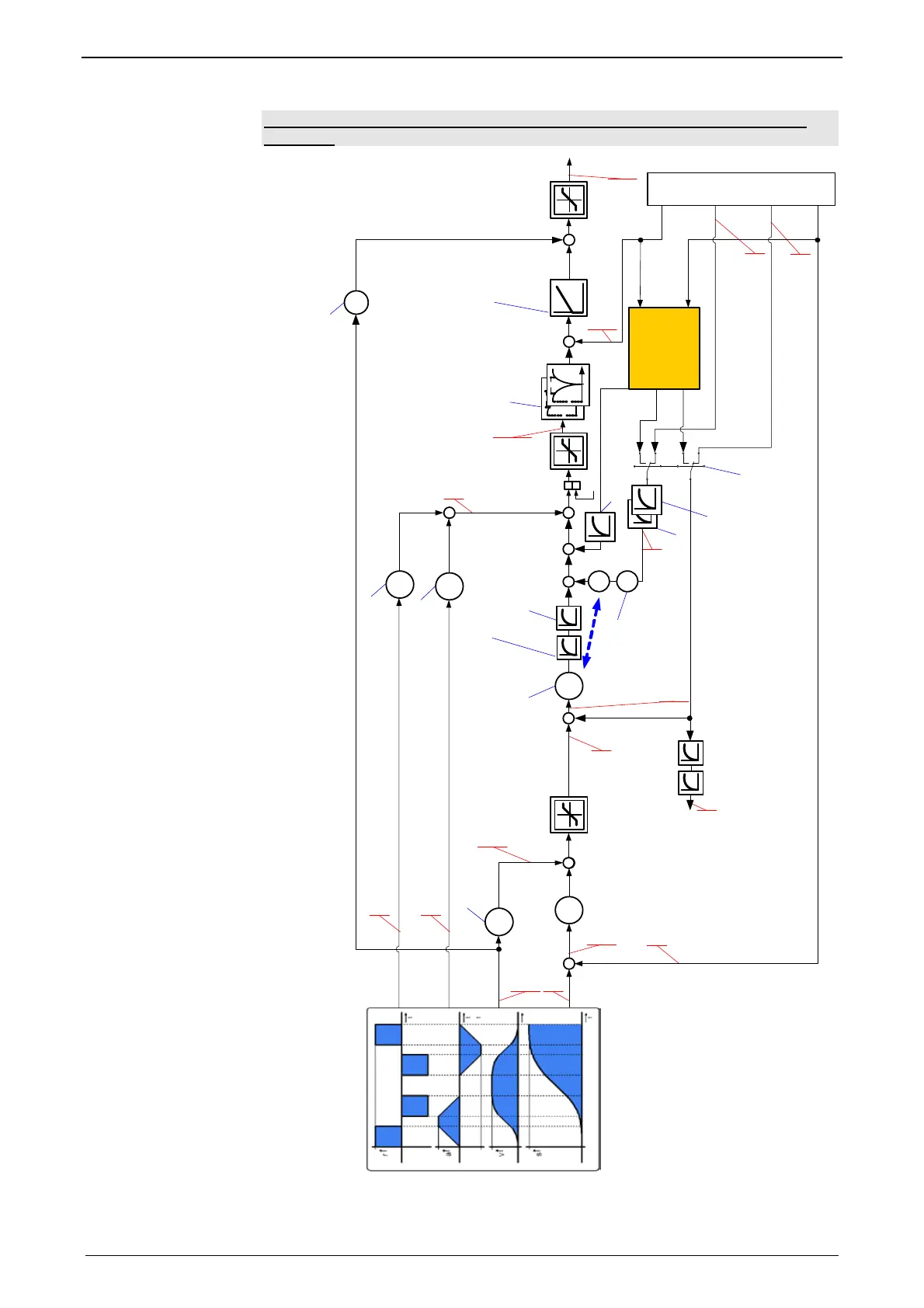
Extended cascade structure (structure variant 2 with disturbance variable
observer)
Actual value monitoring
688 .13 Jer k setpoint generator value
682 .4 Tar get Acceleration of setpoint generator
681 . 4 Tar get Speed of
setpoint gene r ator
680 . 4 Tar get Position
681
.11
Speed feed -forward
688.14 Current & jerk feed -forward RMS
680.6 Position
Tracking error
681 .10 Setpoint Speed
680 .5 Actual Position
681 .6 Speed
Tracking err or
688 .18 Target R MS
motor current
(torque -producing )
2010 .5 Jerk feed -forward
2010 .4 Current feed -forward
2010 .1 Velocity feed -forward
2100 .7 Velocity loop –
"D" term
2100 .8
Current loop –
Bandwidth
2100 .9
Current loop –
Damping
2100 .2 Stiffness
2100 . 3 Dam ping
2100 .4 Moment of Inertia
Setpoint generator
Observe r
Observer o f f : 2120 .1<125µs
Observer on : 2120 .1 >= 125 µs
2100 .
11
Filter 2 - Actual
acceleration
2100 .21 Filter - Actual
acceleration
688.19 Actual RMS motor
current (torque-producing)
681 .5 Actual speed (unfilter ed value )
682.6 Actual Acceleration
682 .5 Actual Acceler ation (unfiltered value )
2150 .1 -2150 .6
2xNotchFilter
2210 .17 R esponse time of the velocity loop
2120 .5 Filter - Observed
disturbance
688 .11 Cur r ent contr ol
actuating signal
2010 .20 EMF feed -forward
2100 .20
Filter
-
actuating signal
(velocity controller )
2100 .10 Fil ter 2 –
actuating signal
(velocity controller )
681 .9 Actual Speed
Vv
K
pv
K
Vi
K
Vj
K
Px
K
D
K
-
-
-
-
f
f
B
d
V
K
T
T T
Kp, T
N
-
-
-
-
f
f
B
d
T
T
pv
K
T
T
.
.
See standard structure
During external setpoint specification, please respect the structure images for elec-
tronic cams or gearboxes for
signal filtering with external setpoint specification
(see page 237) !
 Loading...
Loading...











