Communication
C3I22T11
312 192-120114 N5 C3I22T11 June 2008
5.4.3.2 Operating mode: Direct positioning
The communication between Master and Compax3 is made via the I/O messages
Procedure:
Selection of the motion function: Bit 15, 13, 6 of the controlword 1
Start of the motion function: Bit 4 of the controlword 1
Specification of the motion parameters: Objects of the I/O messages
Design of the I/O messages: DeviceNet – Master -> Compax3
Controlword Operating mode Target position
Iw
n
Iw
n+2
Iw
n+4
Iw
n+6
Iw
n+8
Iw
n+10
Iw
n+12
Iw
n+14
Iw
n+16
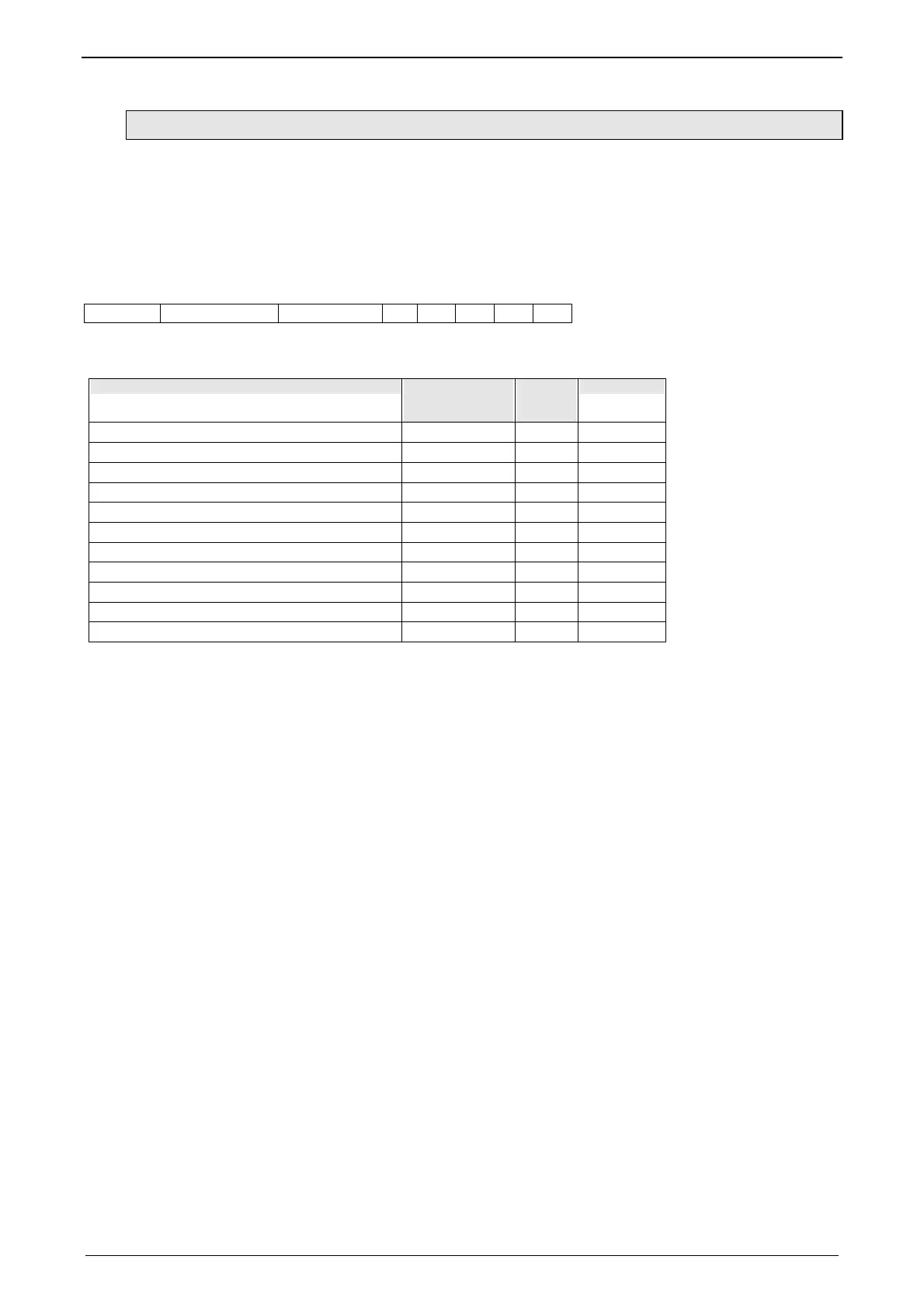
Possible assignment:
Designation Object No.
Instan-
ce.Attribute
Assi-
gned
words
Assignment
Controlword (Control word 1) 1100.3 1 optional
Operating mode 1100.5 1 optional
Target position (position command value) 1100.6 2 optional
Profile velocity Y2 (1 decimal place) 1100.8 1 optional
Profile velocity Y4 (3 decimal places) 1100.7 2 optional
Profile acceleration U16 1111.10 1 optional
Profile acceleration U32 1111.3 2 optional
Profile deceleration U16 1111.16 1 optional
Profile decceleration U32 1111.4 2 optional
Dig. Outputs (0-3) 140.3 1 optional
Dig. outputs M1x option 133.3 1 optional
Layout of the
Control word (see page 317).
Profile velocit
y Y2 and Y4 do have the same function, they differ only in the word
width.
The same applies for Profile acceleration U16 / 832 and Profile deceleration U16 /
U32.
You should therefore only use one of these two values.
The meanings of the assignments change with the Gearing motion function:
Target position (position com-
mand value)
= Gearing numerator
Attention:
 Loading...
Loading...











