Parker EME
Setting up Compax3
192-120114 N5 C3I22T11 June 2008 199
Stiffness
In this chapter you can read about:
Static stiffness.................................................................................................................. 199
Dynamic stiffness............................................................................................................. 199
Correlation between the ter
ms introduced....................................................................... 201
The stiffness of a drive represents an important characteristic. The faster the di-
sturbance variable can be compensated in the velocity control path and the smaller
the oscillation caused, the higher the stiffness of the drive. With regard to stiffness,
we distinguish static and dynamic stiffness.
Static stiffness
The static stiffness of a direct drive is comparable with the spring rate D of a me-
chanical spring, and indicates the excursion of the spring in the event of a constant
interference force. It is the ratio between the constant force FDmax of the motor
and a position difference. Due to the I term in the velocity controller, the static stif-
fness is therefore infinitely high in theory, as the I term is integrated until the control
difference vanishes. In a digital control the static stiffness is above all limited by the
finite resolution of the position signal (the error must be at least one quantization
step, so that it can be detected by the reading system) and by numerical resolution.
Additional effects are for instance mechanical stiffness of the mechanic compo-
nents in the control path (e.g. load connection, guiding system) as well as measu-
rement errors of the measurement system.
Dynamic stiffness
In this chapter you can read about:
Traditional generation of a disturbance torque/force jerk ................................................ 199
Electronic simulation of a disturba
nce torque jerk with the disturbance current jerk ....... 200
Disturbance jerk response ............................................................................................... 200
The dynamic stiffness is described by the ratio between the change in load torque
or in load force and the resulting position deviation (following error):
x
M
L
Δ
Δ
The higher this ratio (=dynamic stiffness), the higher the necessary change is loard
torque in order to generate a defined following error.
The dynamic stiffness can be acquired from the disturbance jerk response.
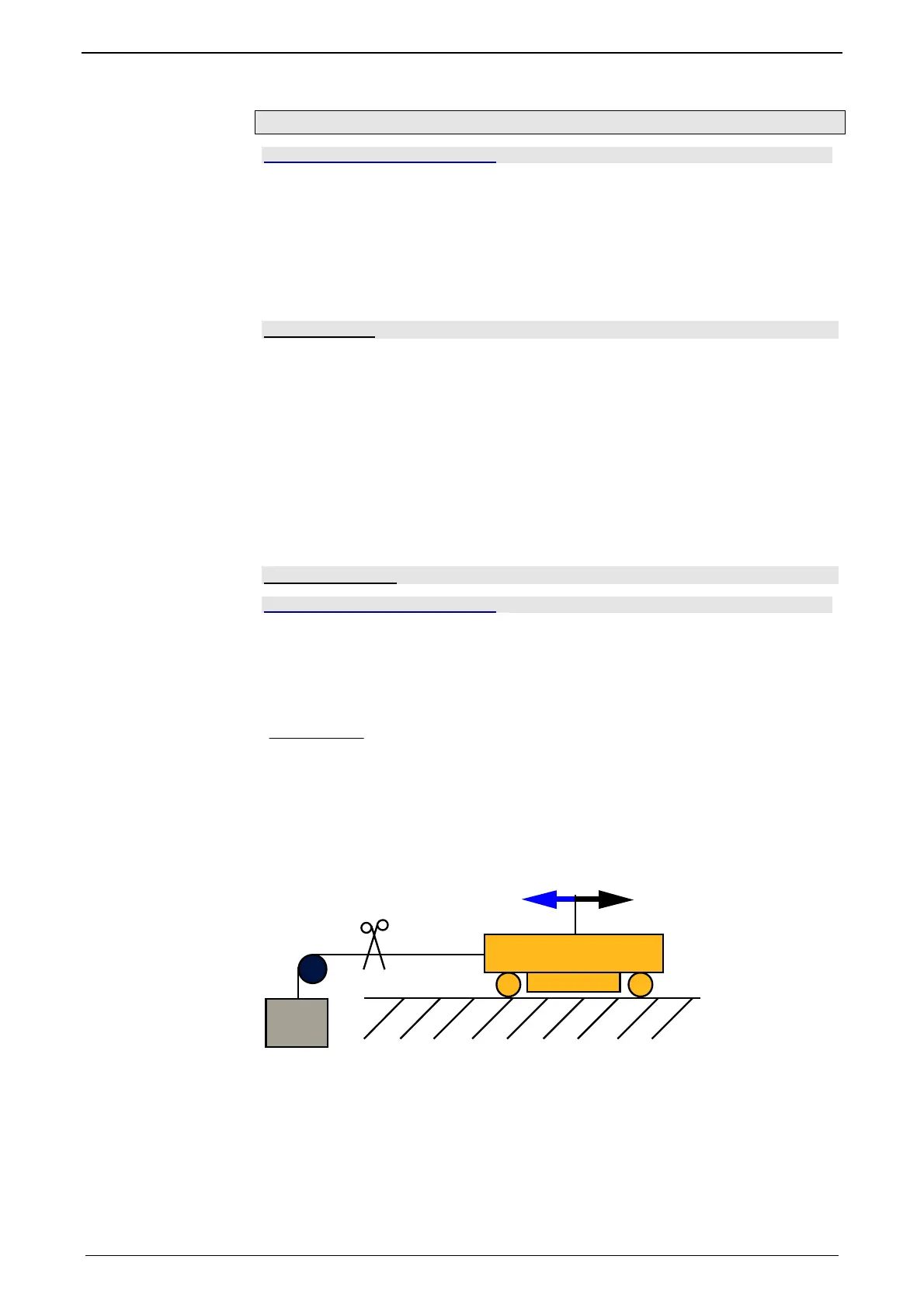
Traditional generation of a disturbance torque/force jerk
F
G
F
M
m
In settled state of the control, the motor force FM corresponds exactly to the load
force FG=m×g.
If the cord is cut through, the load force is eliminated abruptly and the controller
must first of all settle to the new situation.
In order to simulate this load jerk electronically, a disturbance current jerk is fed to
the Compax3 as a variable proportional to the disturbance torque at the velocity
controller output.
 Loading...
Loading...











