Setting up Compax3 C3I22T11
198 192-120114 N5 C3I22T11 June 2008
Limitation behavior
Each control variable is limited by the control (actuating) element. If the control
variable demanded by the controller is within the linear range (without limitation),
the control loop shows the behavior defined by the design. If the controller de-
mands however a higher control variable than permitted by the limitation, the con-
trol variable is limited and the controller slows down.
You should therefore make sure that the control variable (output) of the controller
does not remain within the limitation or only for a very short time.
Cascade control
In this chapter you can read about:
Structure of a cascade control ......................................................................................... 198
Cascade structure of Compa
x3 ....................................................................................... 198
In drive technology, a cascading structure with several controllers (normally 3) is
often used. This improves the control behavior. For this, additional sensors must be
fixed within the control path. You will get the structure of a cascade control.
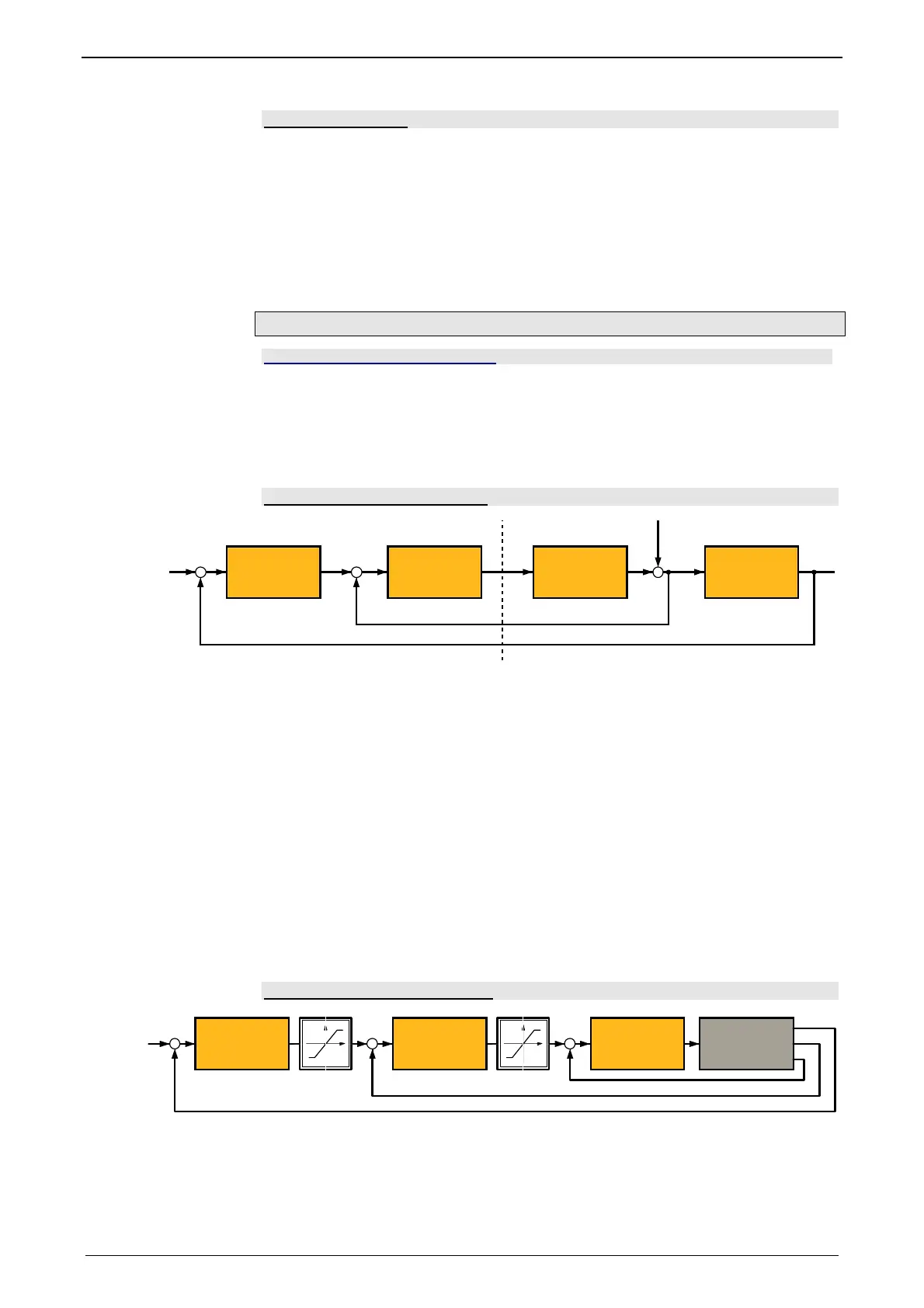
Structure of a cascade control
Z
Process / Prozess
X2X1W1W2
Controller1
Regler 1
Controller 2
Regler 2
Process Part 1
Streckenteil 1
Process Part 2
Steckenteil 2
W1 Setpoint value (setpoint) for the superposed controller 2
W2 Setpoint value (setpoint) for the subordinate controller 1
X2: Actual variable (actual value) for controller 2
X1: Actual variable (actual value) for controller 1
The cascade control offers the following advantages:
Disturbances occurring within the control path, can be compensated in the subor-
dinate control loop. Therefore they must not pass through the entire control path
and are therefore compensated earlier.
The delay times within the path can be reduced for the superposed controller.
The limitation of the intermediate variables can be made by the control variable
limitation of the superposed controller rather easily .
The effects of the non-linearity for the superposed controllers can be reduced by
the subordinate control loops.
In the Compax3 servo controller, a triple cascade control is implemented with the
following controllers - position controller, velocity controller and current controller.
Cascade structure of Compax3
Current Controller
Stromregelung
Motor
Speed Controller
Drehzahlregelung
Position Controller
Positionsregler
Xw
Xn i
Hint
 Loading...
Loading...











