Parker EME
Setting up Compax3
192-120114 N5 C3I22T11 June 2008 197
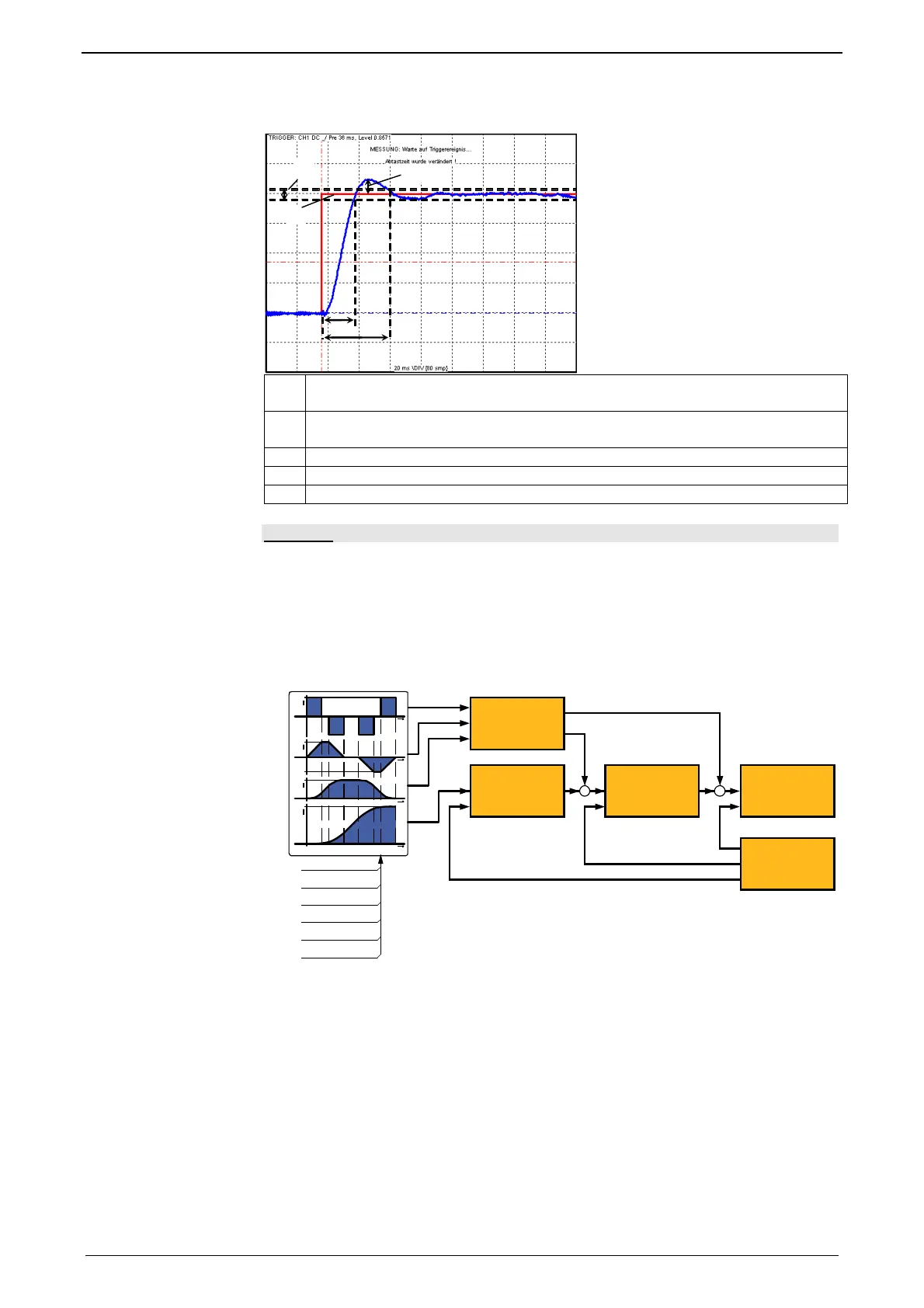
Characteristics of a control loop setpoint response
2
1
T
Sr
T
S
V
m
T
Sr
: Response time. (Time elapsing until the control variable reaches one of the
+-5% tolerance limits for the first time)
T
S
: Settling time. (Time elapsing until the control variable ultimately enters the +-
5% range)
V
m
: maximum overshoot width
1 Tolerance range +-5%
2 Setpoint value
response
The response of the controller is the behavior of the actual value with respect to the
calculated profile of the setpoint generator. the kinematic status variables, speed,
acceleration and jerk are fed into the cascade as feedforward signals. The feedfor-
ward signals work with calculated factors and contribute to an improved contour
constancy due to the minimization of the following error.
Compax3 servo controller structure
Feed Foward Control
Vorsteuerung
PI-Current Controller
PI-Stromregler
Signal Acquistion
Signalerfassung
t
s
v
t
a
t
r
t
Setpoint generator
Setpoint position
Speed
Acceleration
Deceleration
Acceleration jerk
Deceleration jerk
a
w
, n
w
i
w
, j
w
x
n
i
P-Position Controller
P-Positionsregler
PID-Speed Controller
PID-Drehzahlregler
a
w
n
w
x
w
j
w
x: Position actual value n: Actual (rotational) speed i: Actual current
value
x
w
: Setpoint position value n
w
: Velocity setpoint value j
w
: Jerk setpoint value
a
w
: Acceleration setpoint value
 Loading...
Loading...











