3. TARGET TRACKING (TT)
3-19
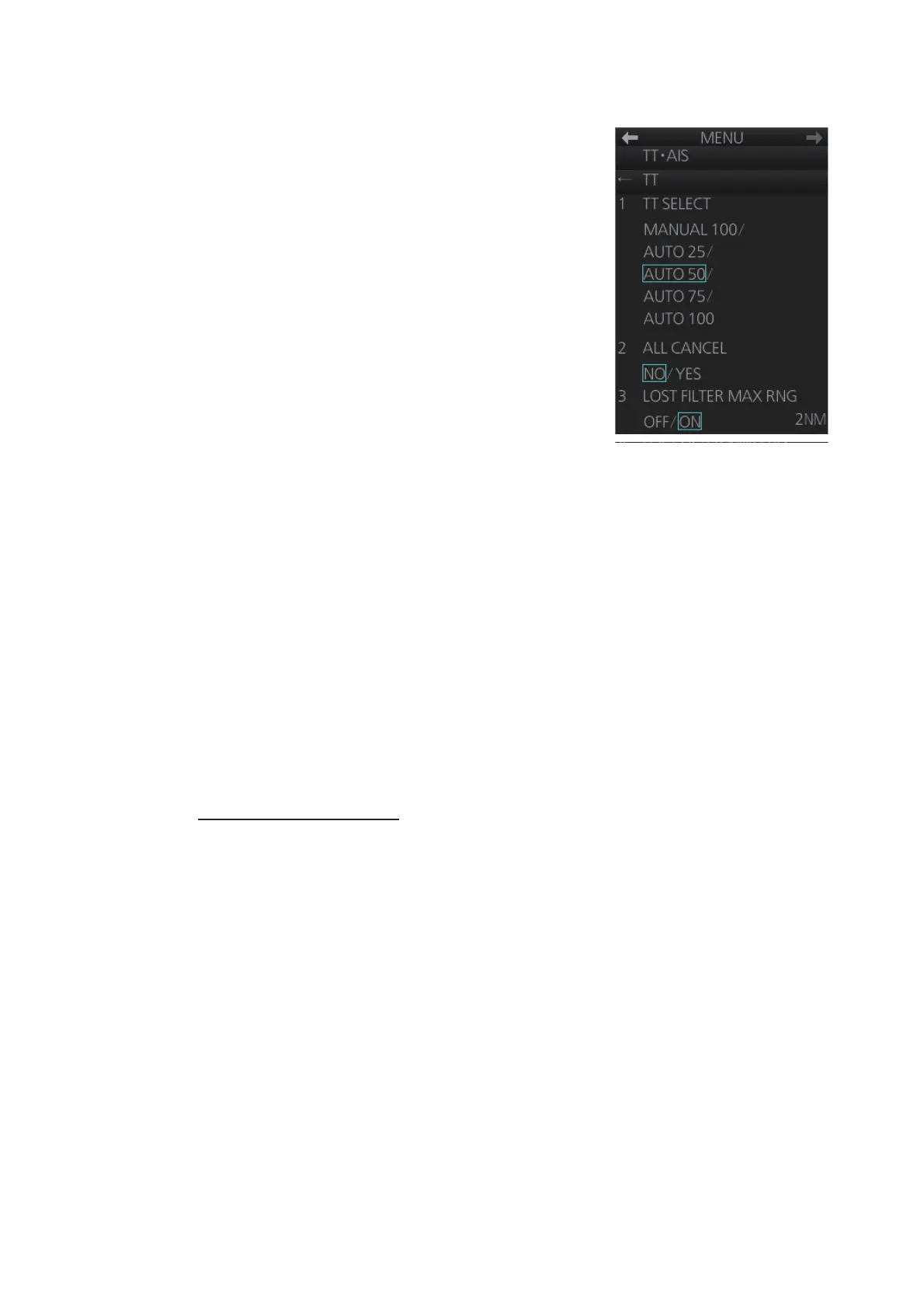
3.13.2 How to set the TT lost target filter
If you are in an area where tracked targets are lost fre-
quently, you may want to disable the lost target alert
against certain tracked targets, by maximum range or
minimum speed.
1. Right-click the TT mode indication then select [TT
Menu] to show that menu.
2. Select [3 LOST FILTER MAX RNG].
3. Spin the scrollwheel to select [ON]. Select the
range setting then spin the scrollwheel to set the
range. Any TT lost targets beyond this range will
not trigger the TT lost target alarm.
4. Select [4 LOST FILTER MIN SPD].
5. Spin the scrollwheel to select [ON]. Select the
speed setting then spin the scrollwheel to set the
speed. Any TT lost targets slower than this setting will not trigger the TT lost target
alarm.
6. Close the menu.
3.14 Trial Maneuver
The trial maneuver feature simulates the effect of own ship's movement against all
tracked targets, without interrupting the updating of target information. It is available
for use with the TT and AIS functions. For more accurate results, use relative motion
and sea stabilization (water tracking).
3.14.1 Types of trial maneuvers
There are two types of trial maneuvers: static and dynamic.
Dynamic trial maneuver
A dynamic trial maneuver displays predicted positions of the tracked targets and own
ship. You enter own ship's intended speed and course with a certain "delay time." As-
suming that all tracked targets maintain their present speeds and courses, the targets'
and own ship's future movements are simulated in 0.5-second increments indicating
their predicted positions in 30-second intervals as illustrated below.
The delay time represents the time lag from the present time to the time when own
ship will actually start to change her speed and/or course. You should therefore take
into consideration own ship's maneuvering characteristics such as rudder delay, turn-
ing delay and acceleration delay. This is particularly important on large vessels. How
much the delay is set the situation starts immediately and ends in a minute.
In the example shown below, own ship will advance straight ahead (even after a ma-
neuver) for a delay time of 2:30 and alters speed and course until operator-specified
intended speed and course are achieved (position OS7 in this example).
 Loading...
Loading...







