T200 User's Manual SECTION 6: T200 FUNCTIONAL OVERVIEW
PAGE 6-10
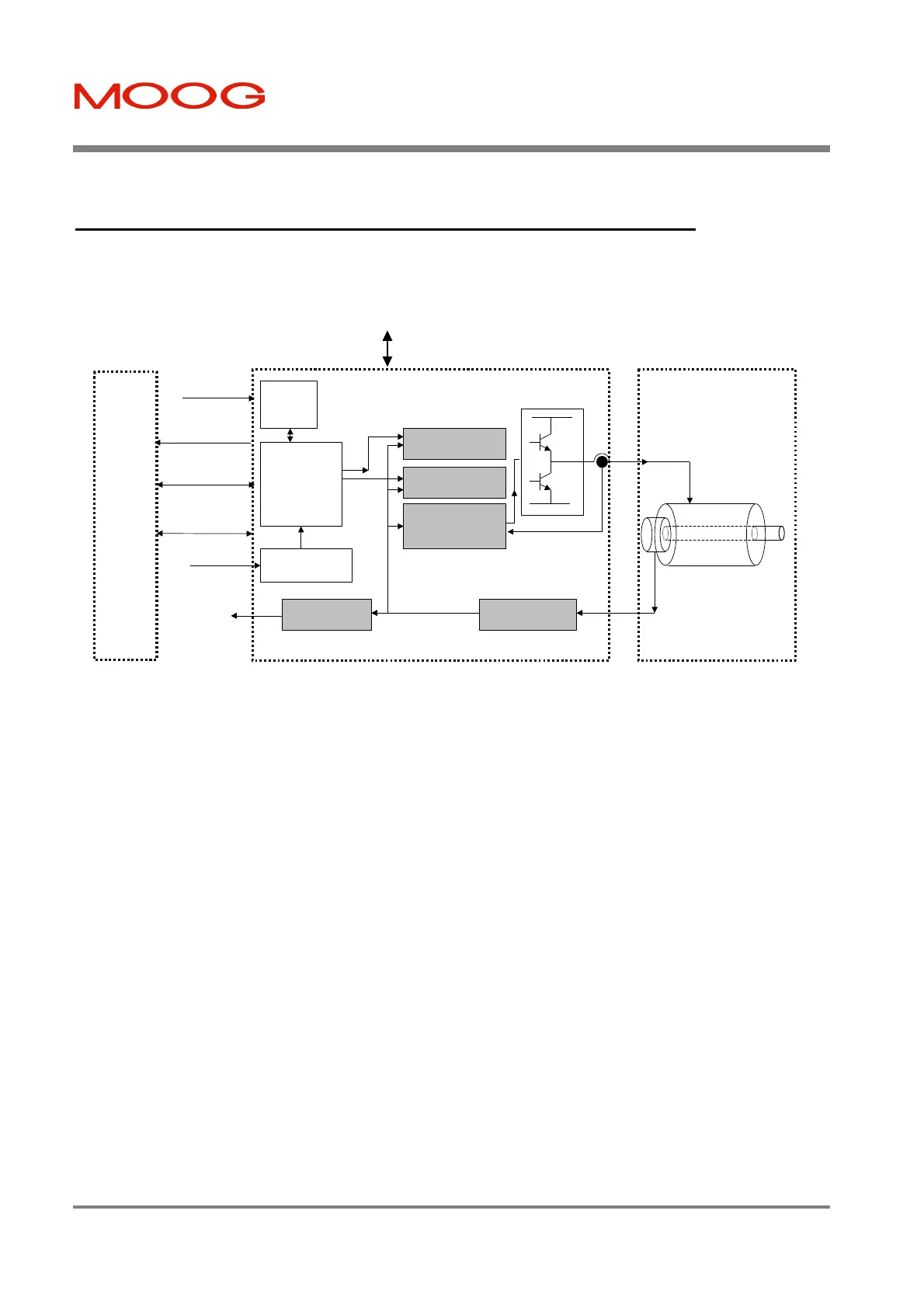
6.2.5 Standalone Motion-Controller Custom Interface Mode ("Point")
The T200 provides a standalone motion control capability. Contact Moog sales offices for further information on the
Point software option.
Velocity Control
Position Control
Vector-Controlled
Torque/Current
Loops
Resolver
Position
3-Phase
Motor
Resolver to Digital
Digital to Encoder
User’s Control
Panel
CAN
Interface
Function
RS232 / RS485
Moog T200 Moog Motor
Analog and
Digital I/O
(as required)
Actual
Motor
Position
CAN Interface
(if required)
‘Point’
Standalone
Motion
Control
Capability
Incremental
Encoder Interface
Incremental
Encoder
Input
Control
Signalling:-
ENABLE
PWR_RDY
AUTO_MAN
BRK_IP
THRM_LIM
DRV_ENBLD
SPD_TRQ_ACHVD
Figure 6.5:- Point Mode Block Diagram
Note that the ENABLE, PWR_RDY and AUTO_MAN inputs are used consistently for all control modes.
• The user can choose from a suite of function blocks called Servo-Control-Algorithms (SCA's). The user may
interlink the inputs and outputs of these function blocks to create control loop configurations. The user may use
analog and digital inputs and outputs as inputs and outputs of these function blocks.
• A Motion Control Language (MCL) program can be created using a BASIC like language. This language includes
a set of arithmetic and logical operators, user variables and other constructs. All T200 input and output, including
CAN interface variables, can be accessed from this motion control language.
• Programmable Logic Controller (PLC) functionality is available through the configuration of logic processing
blocks. PLC functionality is available through the MCL and the SCA's, for background (pre-empted) motion
control programs and as high priority function blocks.
• All CAN operation parameters are accessible via user configurable parameters. The user can then direct CAN high
speed I/O to and from SCA function blocks. Through this mechanism interconnections can be made between
multiple T200's operating in stand-alone motion control mode.
• An incremental encoder interface is provided. It can be accessed from the motion control interface and the SCA's
through a set of user-configurable parameters.
• An internal home position routine can be called to reference the T200 position to the machine.
• A jog function is provided to aid in machine start-up and positioning.
• Software limits are provided for position, velocity and torque. Hardware limits are also provided for position.
The Point option is outlined in the T200 Point User's Manual.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com

 Loading...
Loading...


